

Indoor environment robot exploration method based on heuristic bias sampling
An indoor environment and heuristic technology, applied in the field of robotics, can solve the problems of slow robot exploration, backward exploration, and low efficiency, and achieve the effect of reducing backtracking and improving exploration efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
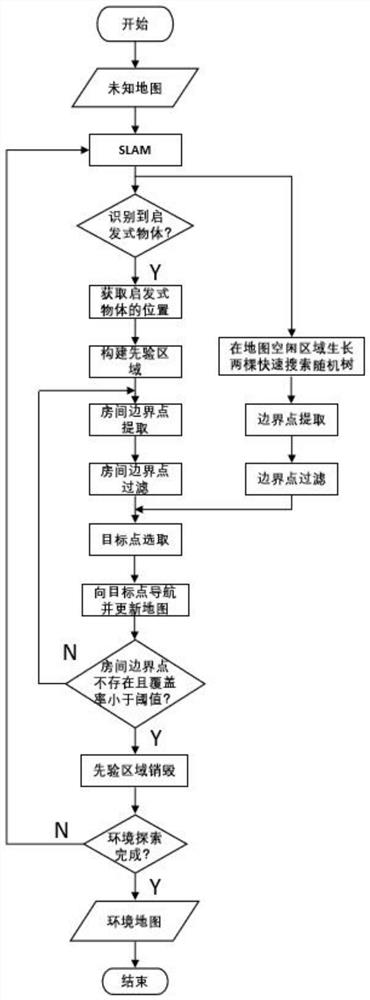
[0048] like figure 1 Shown, is the indoor environment robot exploration method based on heuristic bias sampling in the preferred embodiment of the present invention, comprises the following steps:
[0049] A. Initialization; the entire environment is unknown, the robot is in a certain position in the environment, and the robot obtains the data of the surrounding environment information through the sensor carried by itself.
[0050] B. Perform positioning and mapping; specifically include: receiving sensor data through the SLAM module, updating part of the map to a known area, and at the same time correcting the pose of the robot through the map constructed by the SLAM module.
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More