

Integrative control method of space robot pose and posture with active rope retraction
A technology of space robot and control method, which is applied in attitude control, non-electric variable control, vehicle position/route/height control, etc. It can solve problems such as difficulty in guiding engineering design, failure to consider tension, increase robot structural quality, etc., and achieve engineering Highly achievable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
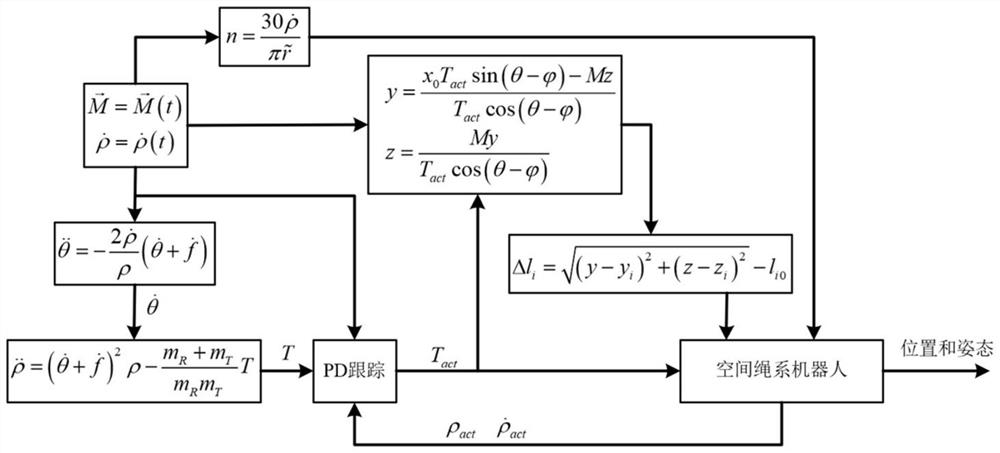
[0082] The invention is based on the active rope receiving technology, and realizes the simultaneous control of the attitude and position of the space robot.
[0083] The present invention provides a space robot position and posture integrated control method for active rope retraction, the method includes two parts: active rope retraction control and tension action point position movement control, such as figure 1 As shown, the specific implementation process of this method is as follows:
[0084] 1. Active rope retraction control, including the following steps:
[0085] (1) According to the control requirements of the relative position between the robot and the target spacecraft, design the rope receiving rate The change law with time t is designed as follows:
[0086]
[0087] where ρ is the relative distance between the robo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More