

Sensorless robot dragging teaching method and system
A robot system and drag teaching technology, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of dragging stuttering and large joint static friction, so as to improve the coefficient of friction and avoid dragging stuttering , Reduce the complexity and cost of the organization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0048] A sensorless robot drag teaching method, suitable for six-axis industrial robots or collaborative robots, the robot includes several joints, each joint is equipped with a motor, the motor needs to support two modes of torque and position, the robot is 6 One of the axis industrial robots or collaborative robots.
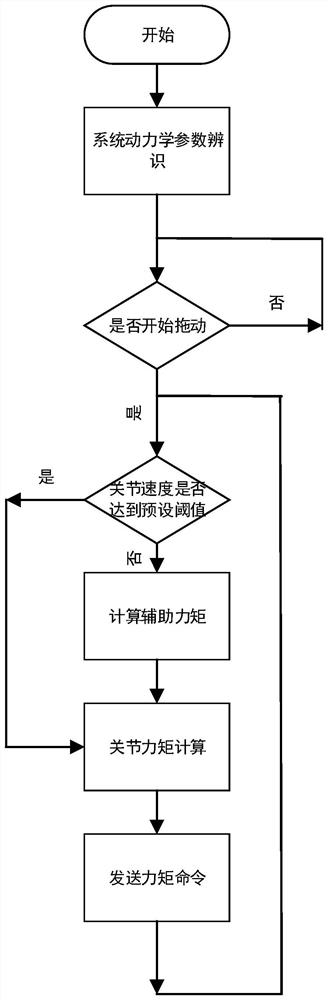
[0049] The method comprises the steps of:
[0050] S1: Carry out dynamic modeling according to the characteristics of the robot, and construct the dynamic equation of the robot arm; the step S1 includes: setting the working mode of the joint servo drive to the position mode,
[0051] by formula
[0052] Construct the dynamic equation of the robot system, where τ represents the output torque of the motor after the reducer, M(θ) represents the inertia matrix, Represents the centrifugal force and Coriolis force matrix, G(θ) represents the gravity term, θ represents the joint angle, represents the first derivative of θ, Denotes the second derivative of θ, ...
Embodiment 2
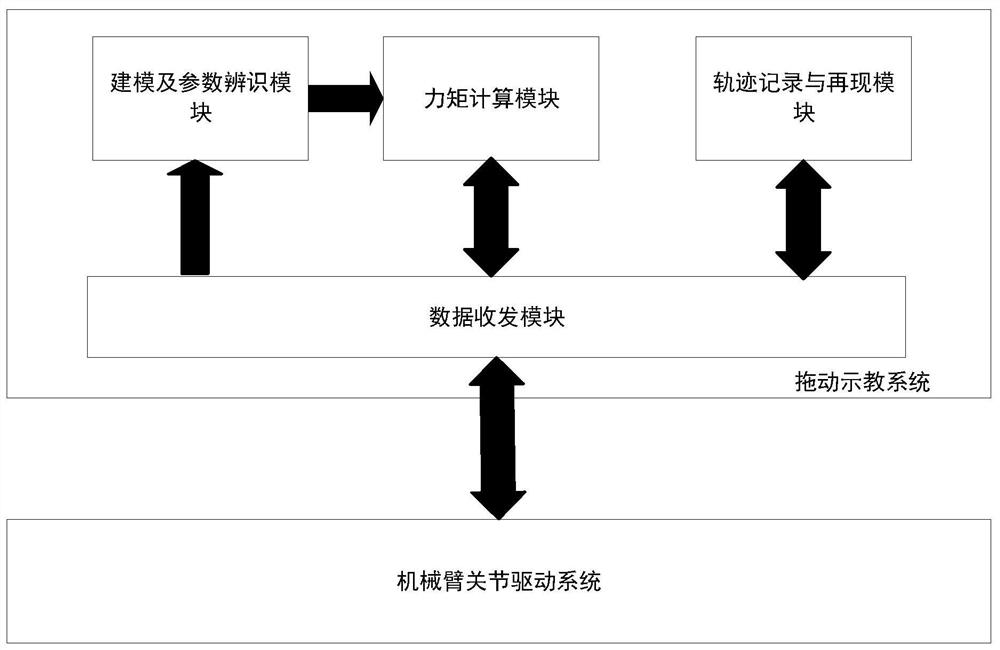
[0063] Such as figure 2 As shown, based on Embodiment 1 of the present invention, Embodiment 2 of the present invention also provides a sensorless robot drag teaching system, which includes:
[0064] The modeling and parameter identification module is used to perform dynamic modeling and parameter identification on the robot according to the characteristics of the robot, and solve the dynamic equation of the robot system;
[0065] The torque calculation module is used to collect the position and speed of each joint in real time, calculate the current torque of each joint according to the dynamic equation of the robot system, and send the calculated current torque of each joint to the servo driver of each joint; When the speed of the joint is lower than the preset threshold, the auxiliary torque is used to update the joint friction torque in the dynamic equation of the robot system, and when the speed of the joint exceeds the preset threshold, the application of the auxiliary ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More