

A pipeline robot with adaptive pipe diameter
A pipeline robot, self-adaptive technology, applied in the direction of pipes/pipe joints/fittings, pipe components, special pipes, etc., can solve the problems of being easily blocked by obstacles, difficult to carry out pipeline exploration work, and low ground clearance of pipeline robots. Achieve the effect of good exploration, good obstacle crossing ability and good shooting field of vision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0075] The following is attached Figure 1-6 The present invention is described in further detail.
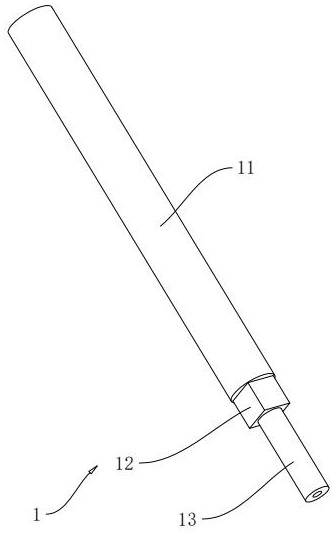
[0076] The embodiment of the present application discloses a pipeline robot with self-adaptive pipe diameter, referring to figure 1 , including a supporting keel 1, an image acquisition device 2, a front roller group 3, a rear roller group 4, a linkage device 5, a driving mechanism 6 and a machine casing 7, wherein the supporting keel 1 is used as a supporting body for the installation of the remaining parts of the pipeline robot , the image acquisition device 2 is used to capture the audio-visual information inside the pipeline, so as to help users know the internal situation of the pipeline. The front roller set 3 and the rear roller set 4 are mainly used to support on the inner wall of the pipeline and drive the pipeline robot to advance. The linkage device 5 links the front roller set 3 and the rear roller set 4 to realize simultaneous elongation or shortening between the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More