Unmanned aerial vehicle coverage path planning method based on three-dimensional model
A 3D model and coverage path technology, applied in the field of UAVs, can solve the problem of being unable to evaluate the full coverage of UAV flight routes, and achieve the effect of reducing costs and improving detection efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention is further illustrated in conjunction with the description.
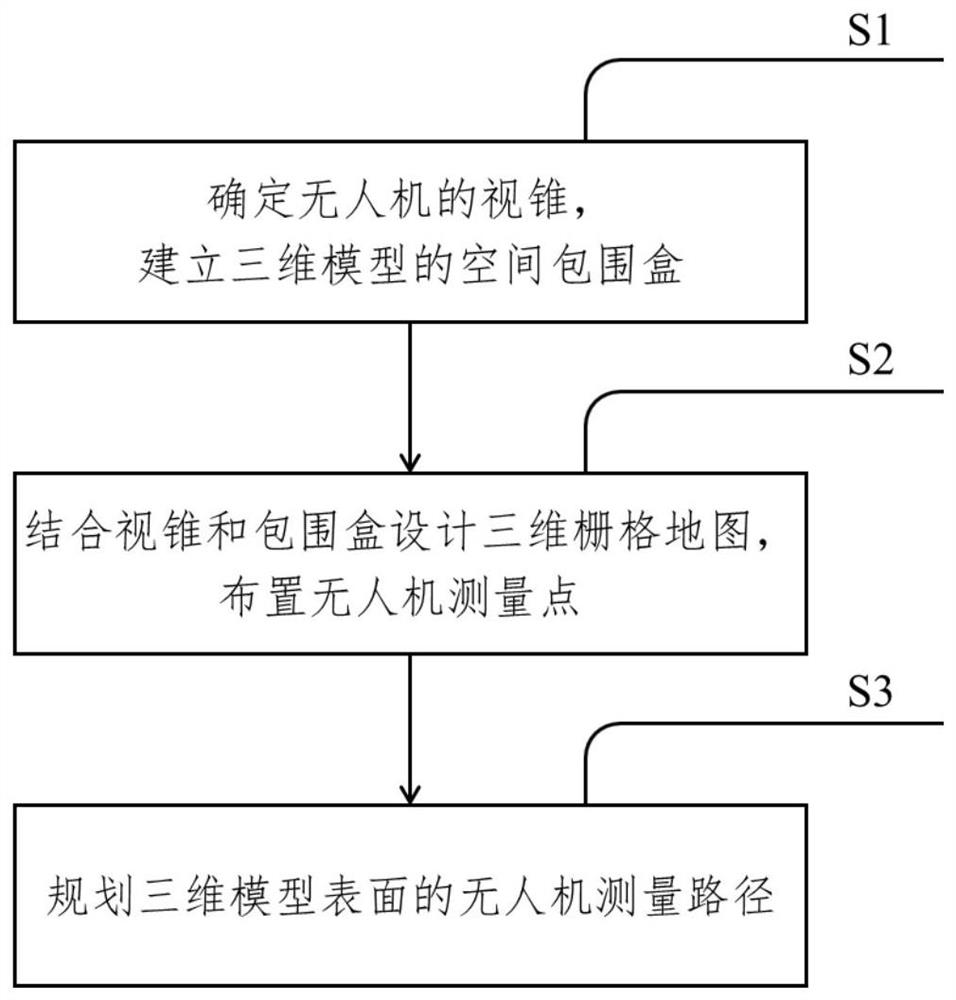
[0043] The present invention provides a modification of a large flexible body deformation monitoring device and method, as an example, such as figure 1 As shown, including the following steps:
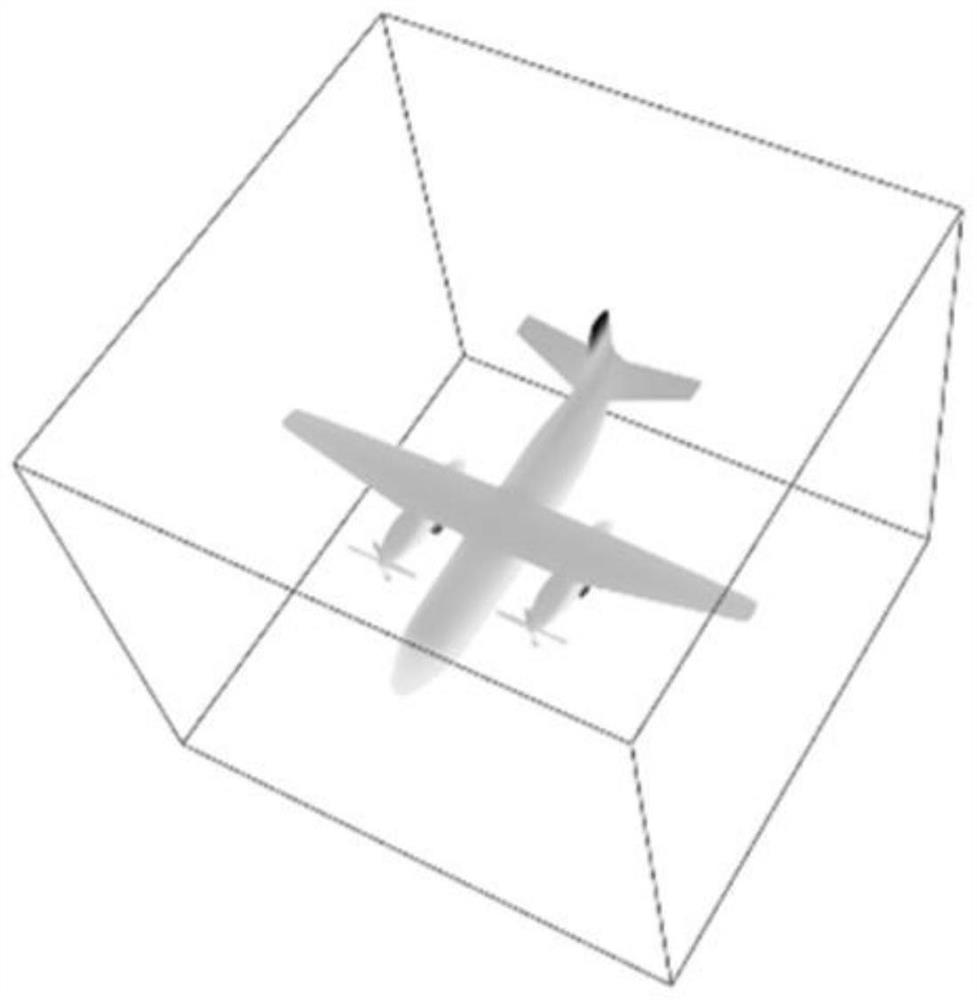
[0044] S1: Determine the cone size of the drone, establish a space envelopment box for the three-dimensional model;
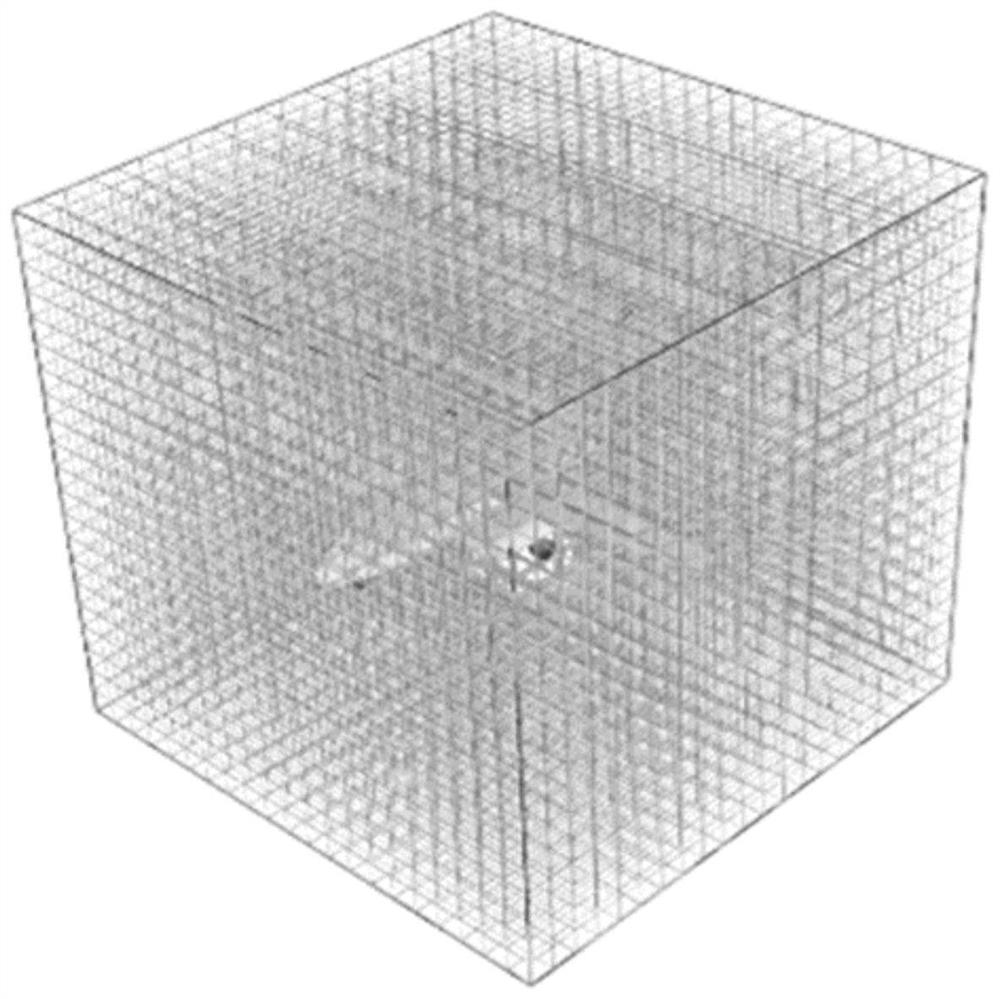
[0045] S2: Combined with cone and envelopes design three-dimensional grid map, arranged drone measurement points;
[0046] S3: Plan the drone measurement path of the three-dimensional model surface.
[0047] Further, it is determined that the disconvel cone size, establishes a space envelope of the three-dimensional model, including the following steps:
[0048] S11: Defines the cone size of the drone to ensure that the working distance of the drone's cone is constituted by a cubic unit, defining the cubic unit edge length L.
[0049] S12: Calculate the maximum value of each of the th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More