Positioning auxiliary device and positioning auxiliary method
A technology of positioning assistance and equipment, applied in the field of medical devices, can solve the problems of increased cost of medical devices and complicated adjustment process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0040] This embodiment provides a positioning aid, including a base, a robot arm, a positioning device and a control unit.
[0041] The base is movably connected with a mechanical arm, and the mechanical arm is used for the operator to operate on the patient on the operating table;
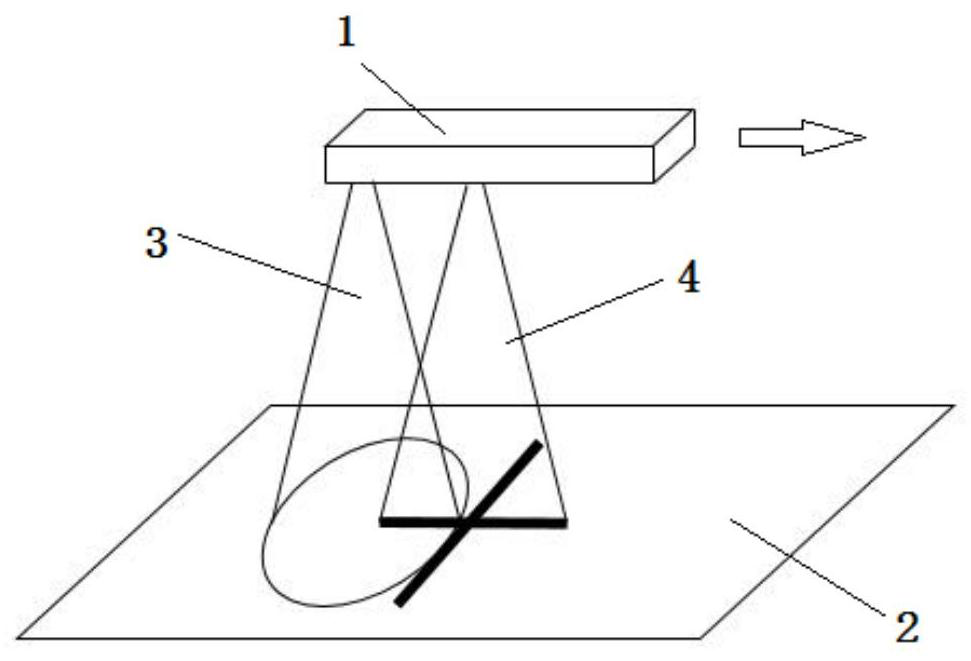
[0042] A positioning device is fixedly installed on the base, and the positioning device is used to transmit a positioning signal to the operating table;
[0043] The control unit is coupled with the robotic arm and the positioning device respectively, and is used to control the movement of the robotic arm and control the positioning device to output positioning information to the operating table, so that the operator can determine the spatial relationship between the robotic arm and the operating table based on the positioning information, and A target work area is determined based on the positioning information.
[0044] The base can include a column (not shown in the figure, only the direction...
Embodiment 2
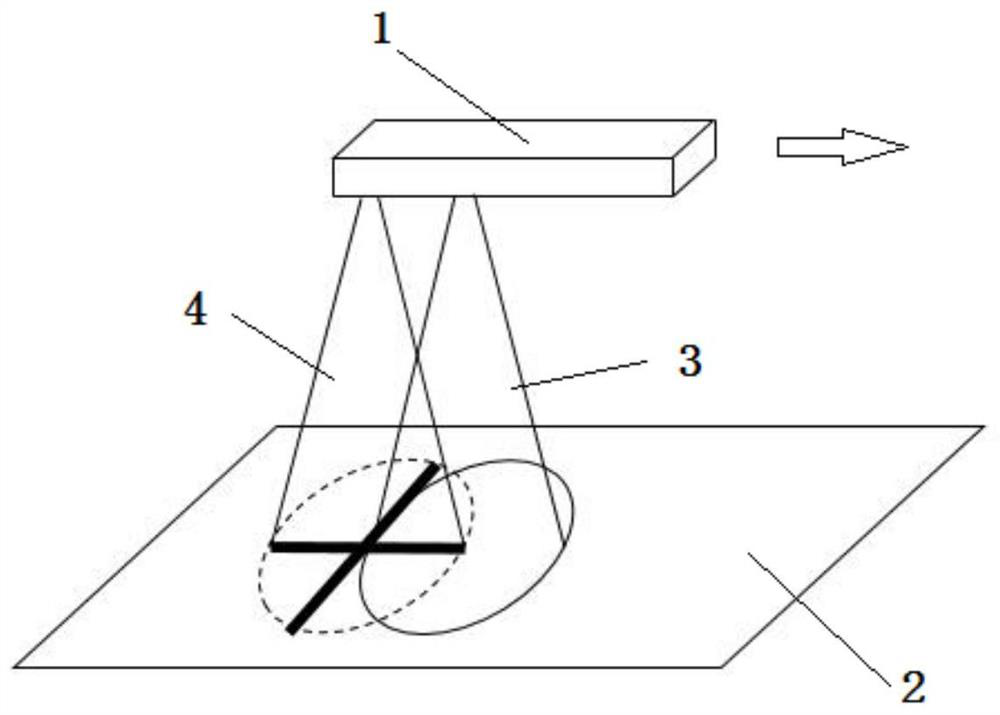
[0051] Such as figure 2 As shown, the positioning aid provided by this embodiment is basically the same as that of Embodiment 1, except that the distance between the first positioning device 3 and the column is smaller than the distance between the second positioning device 4 and the column.
[0052] Specifically, the first positioning device 3 is located at the inner side of the end of the beam 1, and the second positioning device 4 is located at a position closer to the end of the beam 1. At this time, the target working area is located in the circumscribed circle of the cross projection of the second positioning information ( figure 2 The dotted circle shown), that is, within the circumscribed circle area formed by the cross-shaped light spot, the position for aligning the incision of the patient can be determined.
Embodiment 3
[0054] This embodiment provides a positioning assistance method, which includes:
[0055] S1. Determine the position of the operating table 2, and move the base based on the position of the operating table 2 to approach the operating table 2;
[0056] S2. After the base moves, the control unit controls one or more mechanical arms to move to the first position. The first position is the position where the positioning information of the positioning device can be irradiated to the operating table 2. By moving the mechanical arm Arm, so as to prevent the existence of the mechanical arm from blocking the output positioning information of the positioning device from being projected onto the operating table 2 or the patient's body, affecting the positioning effect.
[0057] S3. After the mechanical arm moves, the control unit controls the positioning device to send a positioning signal, and the operator adjusts the spatial relationship between the base and the operating table accordi...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap