

Unmanned aerial vehicle power line inspection method and device, unmanned aerial vehicle and medium
A technology for power lines and unmanned aerial vehicles, applied in the field of unmanned aerial vehicles, can solve problems such as the maximum path deflection angle and the difficulty of power line inspection paths, and achieve the effect of improving inspection efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
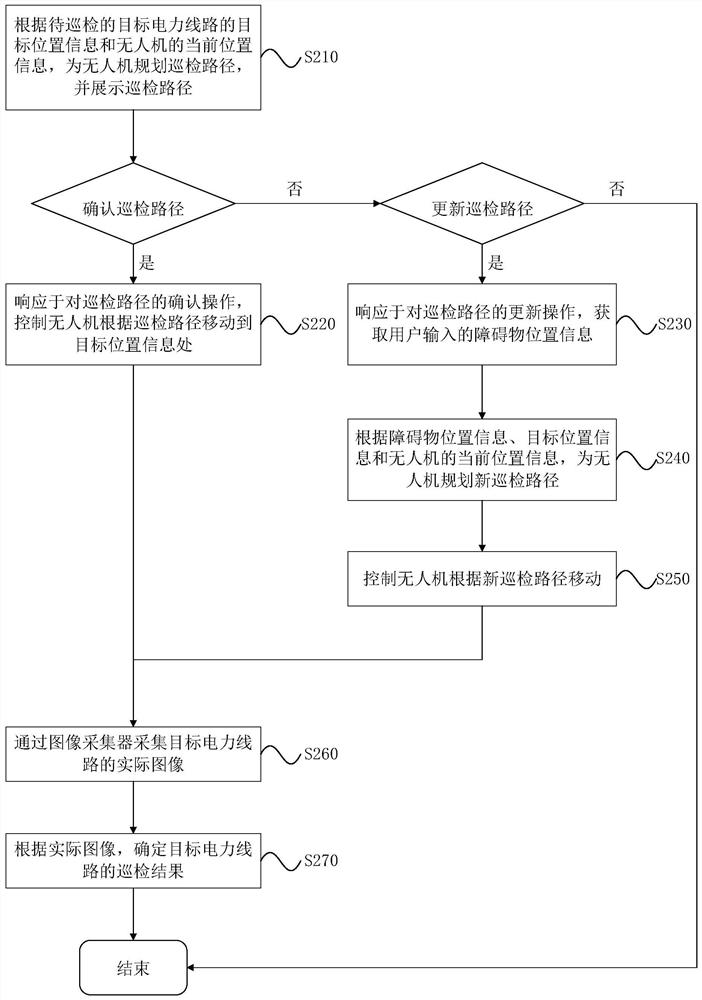
[0045] figure 2 It is a flow chart of a method for patrolling power lines of drones provided by Embodiment 2 of the present invention. This embodiment is based on the above-mentioned embodiments, adding a coping method in case of obstacles encountered by the UAV in the process of performing the power line inspection task according to the planned inspection path. Specifically, such as figure 2 As shown, the inspection method of the UAV power line provided in this embodiment may include:
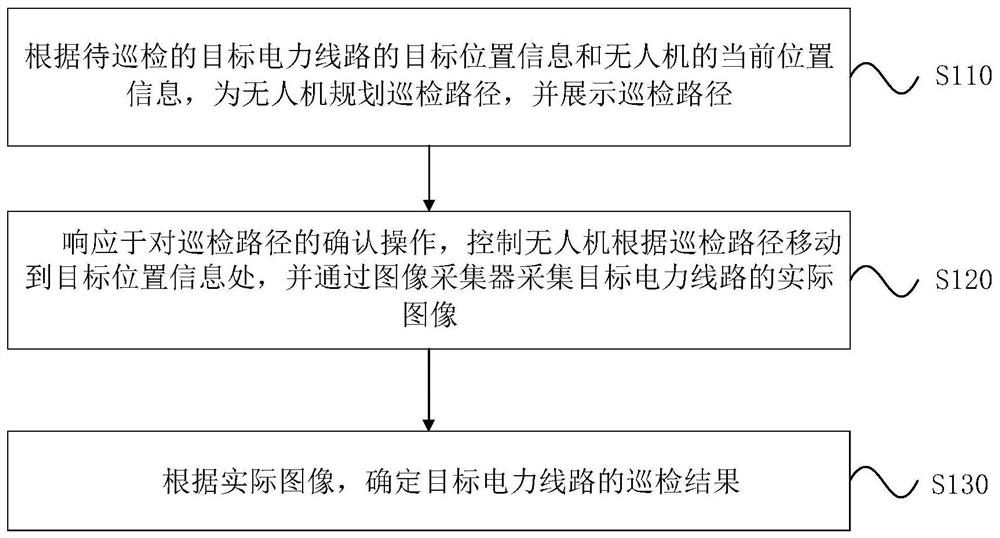
[0046] S210. According to the target location information of the target power line to be inspected and the current location information of the UAV, plan an inspection path for the UAV, and display the inspection path.
[0047] In this embodiment, a confirmation control and an update control for the inspection path may be provided. When the user operates the confirmation control, the confirmation operation for the inspection path is detected and S220 is continued; when the user operates the...
Embodiment 3
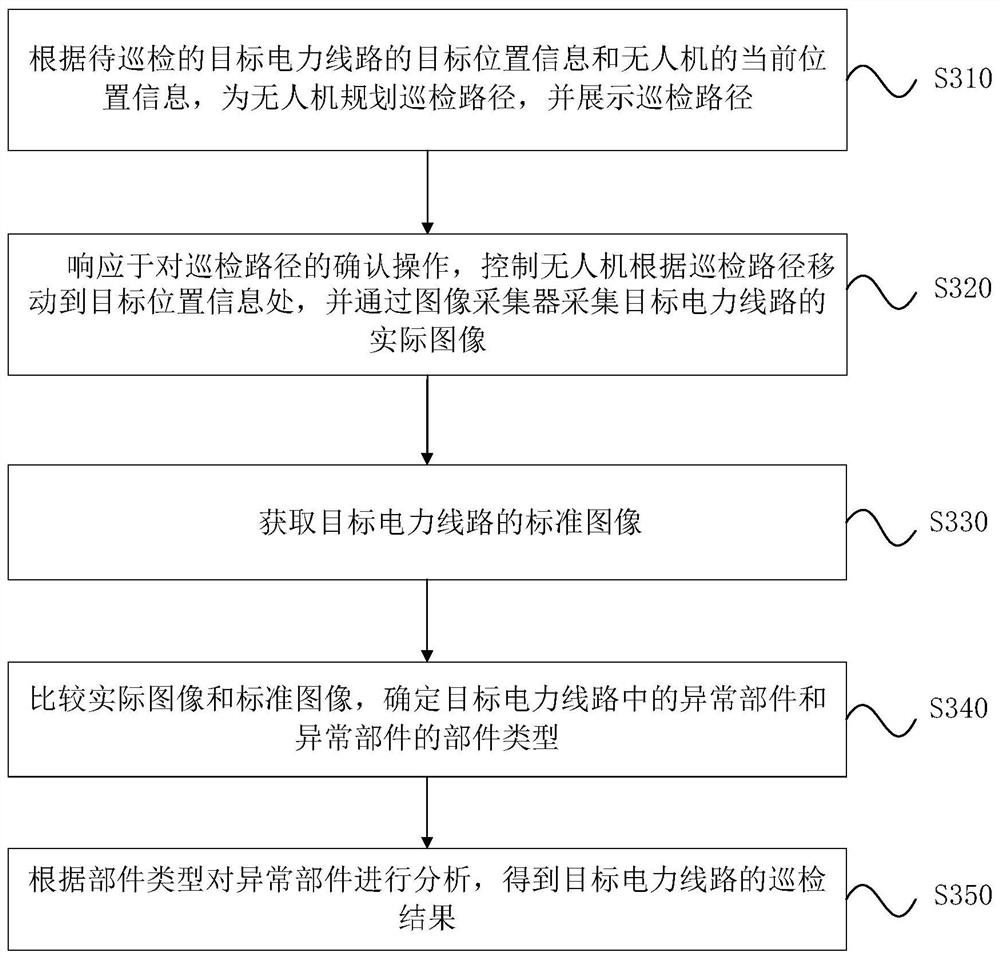
[0059] image 3 It is a flow chart of a method for patrolling power lines of drones provided by Embodiment 3 of the present invention. This embodiment is optimized on the basis of the above-mentioned embodiments, adding pre-acquired standard images of the target power line under normal working conditions, comparing the actual image of the target power line collected by the image collector with the standard image, and determining according to the comparison results Processes such as inspection results of target power lines. Specifically, such as image 3 As shown, the inspection method of the UAV power line provided in this embodiment may include:
[0060] S310. According to the target location information of the target power line to be inspected and the current location information of the UAV, plan an inspection path for the UAV, and display the inspection path.
[0061] S320. In response to the confirmation operation of the inspection path, control the UAV to move to the t...
Embodiment 4
[0088] Figure 4 It is a flow chart of a method for patrolling power lines of drones provided by Embodiment 4 of the present invention. This embodiment is optimized on the basis of the above-mentioned embodiments, adding processes such as determining the inspection result of the target power line by the temperature of the line components in the target power line. Specifically, such as Figure 4 As shown, the inspection method of the UAV power line provided in this embodiment may include:
[0089] S410. According to the target location information of the target power line to be inspected and the current location information of the UAV, plan an inspection path for the UAV, and display the inspection path.
[0090] S420. In response to the confirmation operation of the inspection path, control the UAV to move to the target location information according to the inspection path, and collect the actual image of the target power line through the image collector.
[0091] Optionall...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More