

A Point Cloud Registration Optimization Method Based on Normal Distribution Transformation Hypothesis Checking
A technology of normal distribution transformation and point cloud registration, which is applied in image analysis, image enhancement, instruments, etc., and can solve problems such as complex steps
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
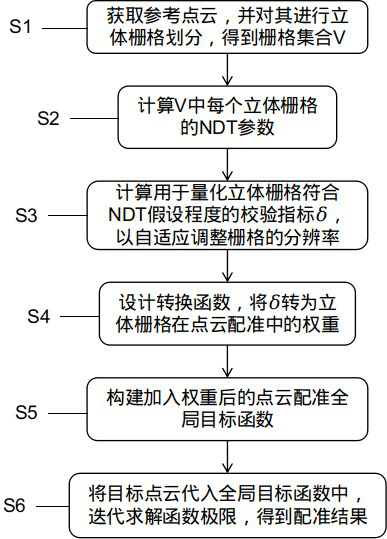
[0041] Such as figure 1 As shown, a kind of point cloud registration optimization method based on normal distribution transformation assumption verification in this embodiment includes the following steps:
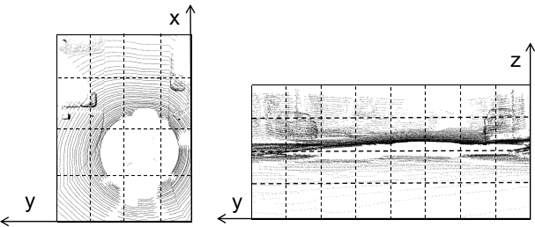
[0042] S1. Obtain the reference point cloud input at a certain moment, divide the reference point cloud into three-dimensional grids according to the resolution of a fixed size, and obtain a set V of three-dimensional grids, V={v 1 ,v 2 ,...,v n}, n is the number of stereo grids.
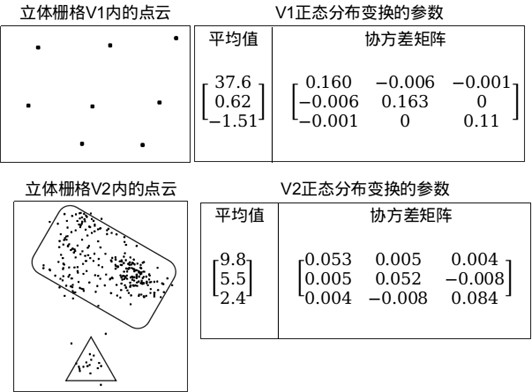
[0043] S2. For each three-dimensional grid in the set V, calculate its v when it conforms to the normal distribution transformation μ and v Σ , where v μ Indicates the coordinate mean value of the point cloud in the st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More