

Kinect-based robot self-positioning method
A robot, self-positioning technology, applied in two-dimensional position/channel control and other directions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0046] The present invention will be described in further detail below in conjunction with the accompanying drawings.
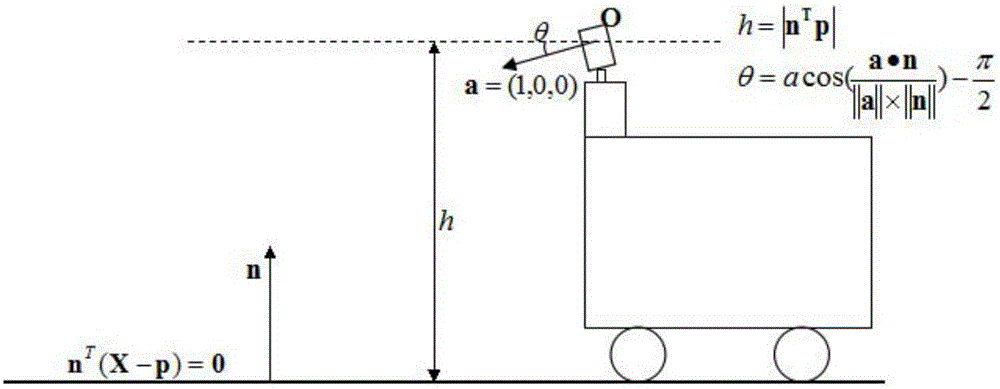
[0047] A kind of robot self-positioning method based on Kinect of the present invention comprises the following steps:
[0048] (1) The Kinect camera is fixedly installed on the robot, and the RGB image information and depth image information of the environment are collected by the Kinect camera;
[0049] (2) Perform three-dimensional restoration of the depth image information to obtain three-dimensional point cloud data: set the focal length of the Kinect depth camera as f x and f y , the optical center is (c x ,c y ), restore the three-dimensional coordinates (X, Y, Z) of any point (x, y) on the depth image by formula (1);
[0050] X = ( x - c x ) * 1 f x ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More