

Positioning confidence optimization method based on Bayesian multi-sensor error constraint
An error constraint and optimization method technology, applied in the fields of navigation positioning and information fusion applications, can solve the problems of difficult closed-loop global correction, no application, and easy occlusion, and achieves the effect of simple and easy method, optimized accuracy, and improved accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0072] In order to better illustrate the purpose and advantages of the present invention, the technical solution of the present invention will be further described below.
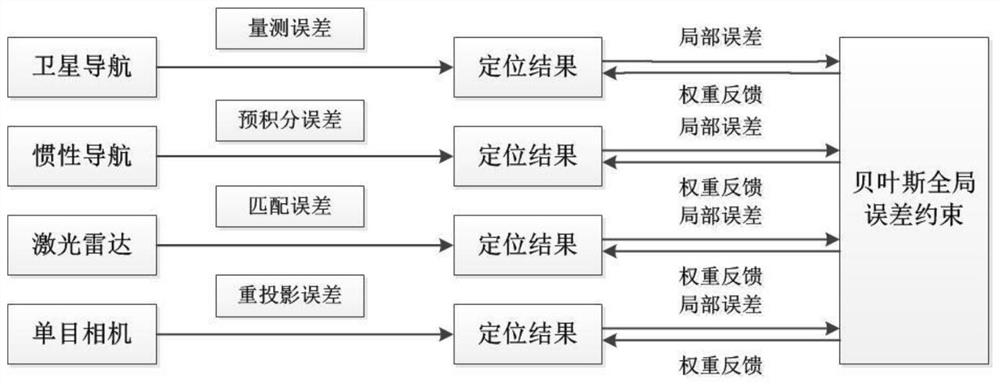
[0073] A positioning reliability optimization method based on Bayesian multi-sensor error constraints. The equipment required for this method includes GNSS receivers, inertial navigation IMUs, laser radars, and optical cameras. Such as figure 1 As shown, satellite observations are obtained by GNSS receivers, accelerometers and angular velocities are obtained by IMUs, point clouds are obtained by lidar, sequence images are obtained by optical cameras, error constraints of multi-sensor state update models are extracted, and multi-sources are introduced in the sliding window of time series The Bayesian decision equation with balanced weights constructs a joint global error constraint equation, optimizes the adaptive fusion positioning framework, and obtains the best confidence positioning solution for multi-so...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More