

Method, device and equipment for acquiring multi-person multi-rigid-body TPose information
A multi-rigid body and rigid-body technology, which is applied in the field of obtaining multi-person multi-rigid body TPose information, can solve the problems such as multi-person multi-rigid body TPose is prone to failure, and achieve the effect of improving motion capture accuracy, accuracy, and success rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
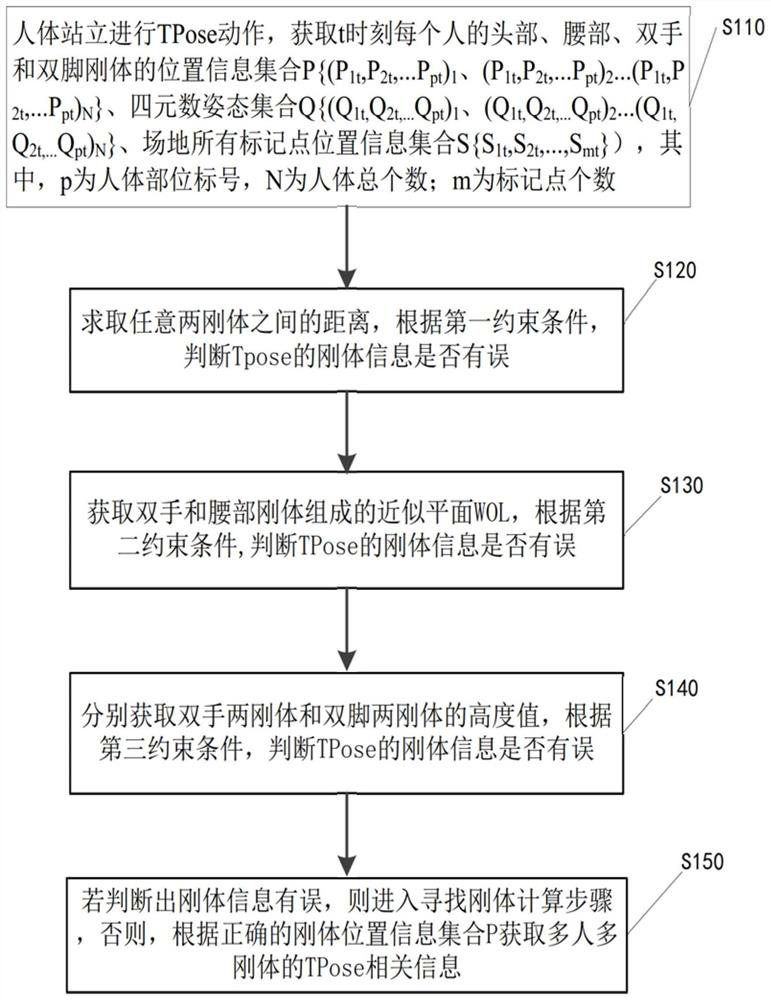
[0037] Please refer to figure 1 , the present application discloses a method for acquiring multi-person multi-rigid body TPose information, the method includes steps S110-S150, which will be described separately below.
[0038] Step S110, the human body stands up and performs TPose action, and obtains the position information set P{(P 1t , P 2t ,...P pt ) 1 , (P 1t , P 2t ,...P pt ) 2 ...(P 1t , P 2t ,...P pt ) N}, quaternion pose set Q{(Q 1t , Q 2t,...Q pt ) 1 , (Q 1t , Q 2t ,...Q pt ) 2 ...(Q lt , Q 2t ,...Q pt ) N}, the location information set of all marker points in the venue S{S 1t , S 2t ,...,S mt}) and other information, wherein, p is the label of the body part, N is the total number of the body; m is the number of marking points;
[0039] In one embodiment, multiple human bodies first perform the TPose action at a certain distance, that is, the human body stands in a T-shape: the hands are spread horizontally, the legs are close together, the...
Embodiment 2
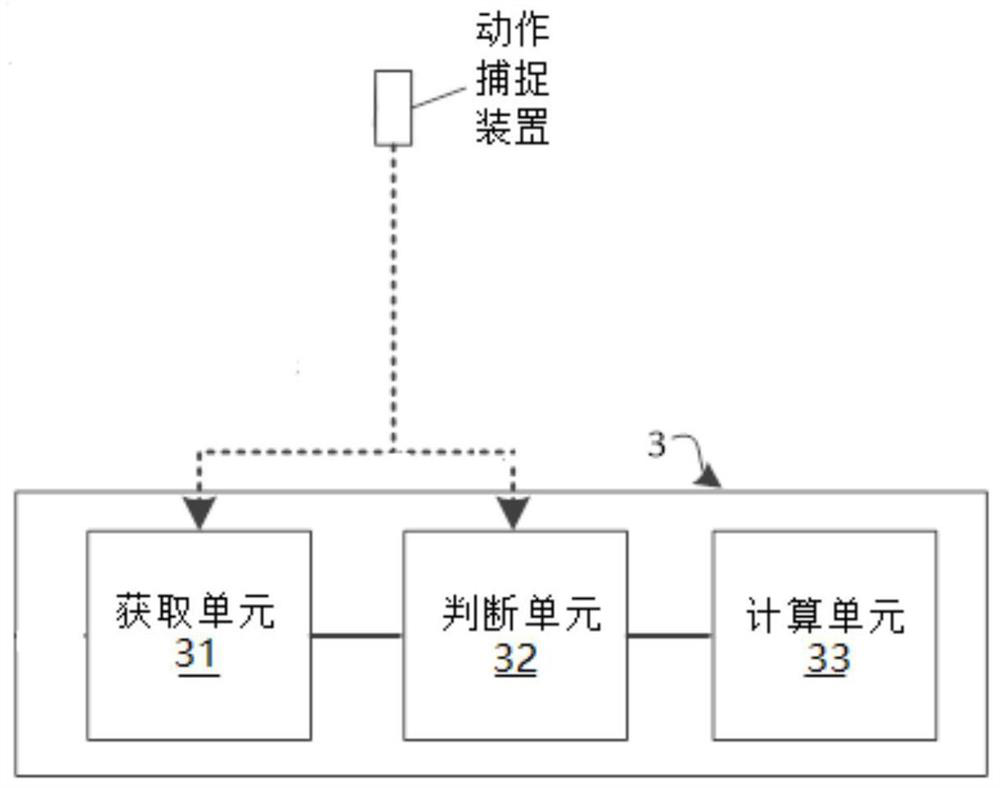
[0061] Please refer to figure 2 , the present application discloses a device 3 for acquiring multi-person multi-rigid body TPose information, including:
[0062] The acquisition unit 31 is used for the human body to stand and perform TPose actions, and acquire the position information set P{(P 1t , P 2t ,...P pt ) 1 , (P 1t , P 2t ,...P pt ) 2 ...(P 1t , P 2t ,...P pt ) N}, quaternion pose set Q{(Q 1t , Q 2t ,...Q pt ) 1 , (Q 1t , Q 2t ,...Q pt ) 2 ...(Q 1t , Q 2t ,...Q pt ) N}, the location information set of all marker points in the venue S{S 1t , S 2t ,...,S mt}), wherein, p is the body part label, N is the total number of the human body; m is the number of marking points;
[0063]The judging unit 32 is used to obtain the distance between any two rigid bodies, and judge whether the rigid body information of TPose is wrong according to the first constraint condition; obtain the approximate plane WOL composed of both hands and the waist rigid body, ...
Embodiment 3
[0066] Please refer to image 3 , the present application also discloses a device 4 for acquiring multi-person multi-rigid body TPose information, the device 4 may include a memory 41 and a processor 42, and includes a multi-person and multi-body multi-body multi-body information stored in the memory 41 and operable on the processor 42. Method procedure for rigid body TPose information. In addition, it should be noted that the method program for obtaining multi-person multi-rigid body TPose information here can implement the steps of the method for obtaining multi-person multi-rigid body TPose information in Embodiment 1 (ie steps S110 and S150 ) when executed by the processor 42 .
[0067] It should be noted that, in this embodiment, the method program for obtaining multi-person and multi-rigid body TPose information stored on the memory 41 may include some functional modules, such as the obtaining unit 31, the judging unit 32 and the computing unit requested for protection i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More