

Vehicle local path planning method, automatic driving system and automatic driving vehicle
A local path planning and automatic driving technology, applied to road network navigators, measuring devices, instruments, etc., can solve the problem of difficulty in expressing the relative position of vehicles and roads, unaware of the smoothness of switching roads, and unclear relative relationships, etc. problems, to achieve the effect of improving safety and patency, improving patency, and improving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] Embodiments of the present invention are described in detail below, and the embodiments described with reference to the drawings are exemplary, and embodiments of the present invention are described in detail below.
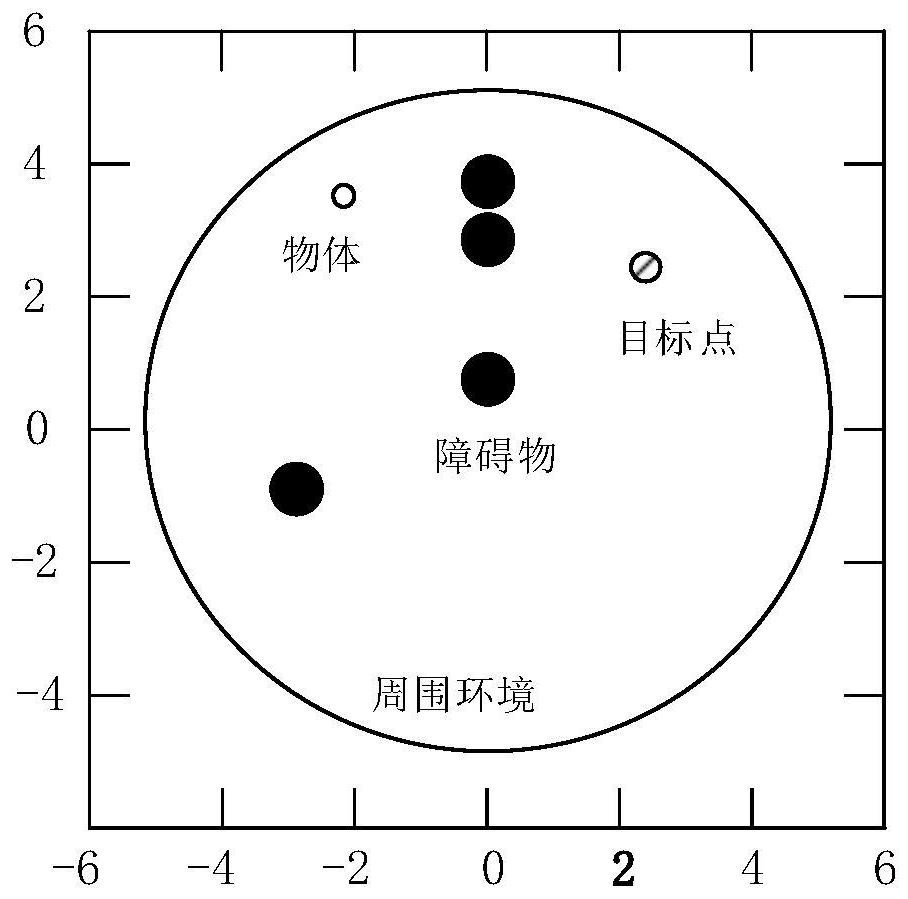
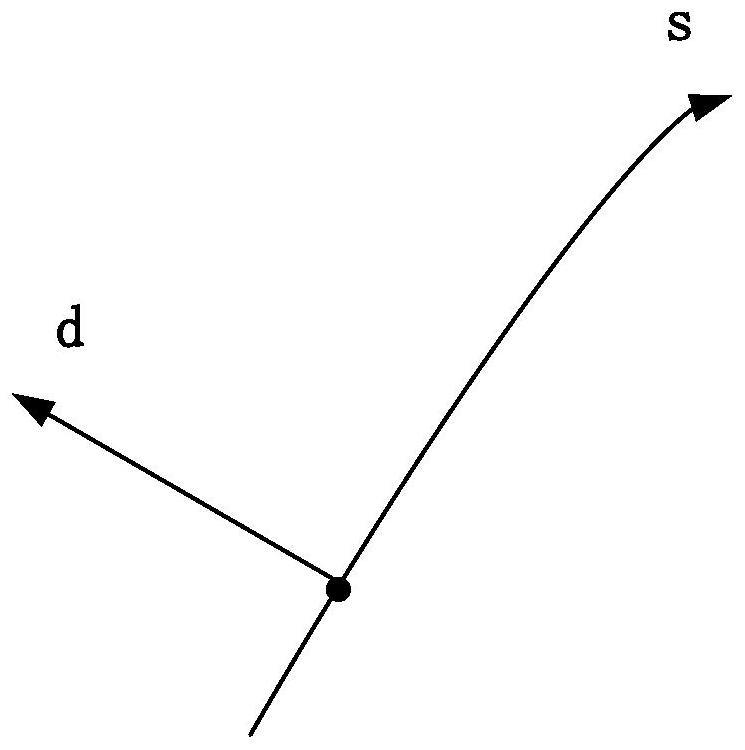
[0042] When the vehicle performs local vehicle path planning due to avoiding obstacles or other braking reasons, it is difficult for the Cartesian coordinate system to express the relative position between the vehicle and the road, resulting in an unclear relative relationship between the two, and in vehicle local path planning. At the same time, it can only avoid obstacles and vehicles without realizing the smoothness of driving after switching roads.
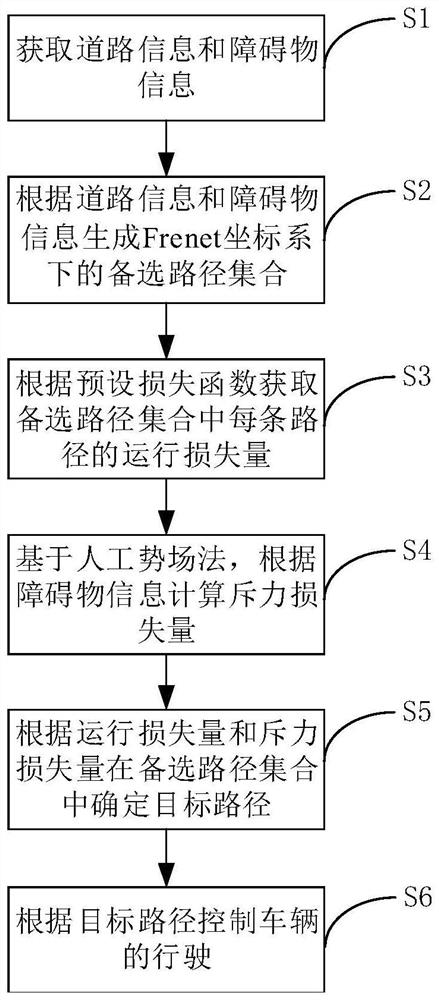
[0043] In order to solve the above problems, the present invention provides a vehicle local path planning method. Effectively improve the safety and smoothness of path planning in the process of automatic driving.
[0044] Refer below figure 1 Describe the vehicle local path planning method of the embodi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More