

Aircraft obstacle avoidance path planning method
A path planning, aircraft technology, applied in the direction of instruments, vehicle position/route/altitude control, non-electric variable control, etc., can solve the problem of no obstacle avoidance function, etc., to achieve the effect of broad application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
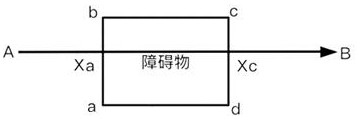
[0051] Example 1: When the intersection point of the route and the obstacle is [Xa, Xc], in order to avoid the obstacle, there are two options for planning the path: one is to go around along the two points b and c, and the other is to follow The two points a and d go around, and the law is clockwise:
[0052] ①If the original route is A→B, the obstacle avoidance route is corrected as: A→Xa→b→c→Xc→B;
[0053] ②If the original route is B→A, the obstacle avoidance route is corrected to: B→Xc→d→a→Xa→A.
Embodiment 2
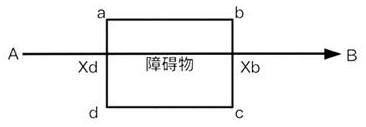
[0054] Example 2: When the intersection point of the route and the obstacle is [Xd, Xb], in order to avoid the obstacle, there are two options for planning the path: one is to go around along two points a and b, and the other is to follow D, c two points around, with clockwise around the law:
[0055] ①If the original route is A→B, the obstacle avoidance route is corrected as: A→Xd→a→b→Xb→B;
[0056] ②If the original route is B→A, then the obstacle avoidance route is corrected to: B→Xb→c→d→Xd→A.
Embodiment 3
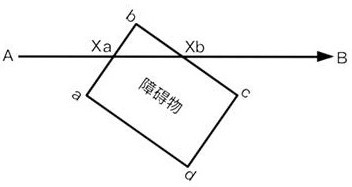
[0057]Example 3: When the intersection point of the route and the obstacle is [Xa, Xb], in order to avoid the obstacle, there are two options for planning the path: one is to go around point b, and the other is to follow a, d , c around the three points, with clockwise around the law:
[0058] ①If the original route is A→B, the obstacle avoidance route is corrected as: A→Xa→b→Xb→B;
[0059] ②If the original route is B→A, the obstacle avoidance route is corrected to: B→Xb→c→d→a→Xa→A.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More