Unmanned aerial vehicle cooperative track control method based on hybrid swarm intelligence algorithm
A technology of swarm intelligence algorithm and control method, which is applied in three-dimensional position/channel control, calculation, calculation model, etc., can solve problems such as falling into local optimum, poor local search ability, and easy prematurity, and achieve a wide range of solutions and high efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
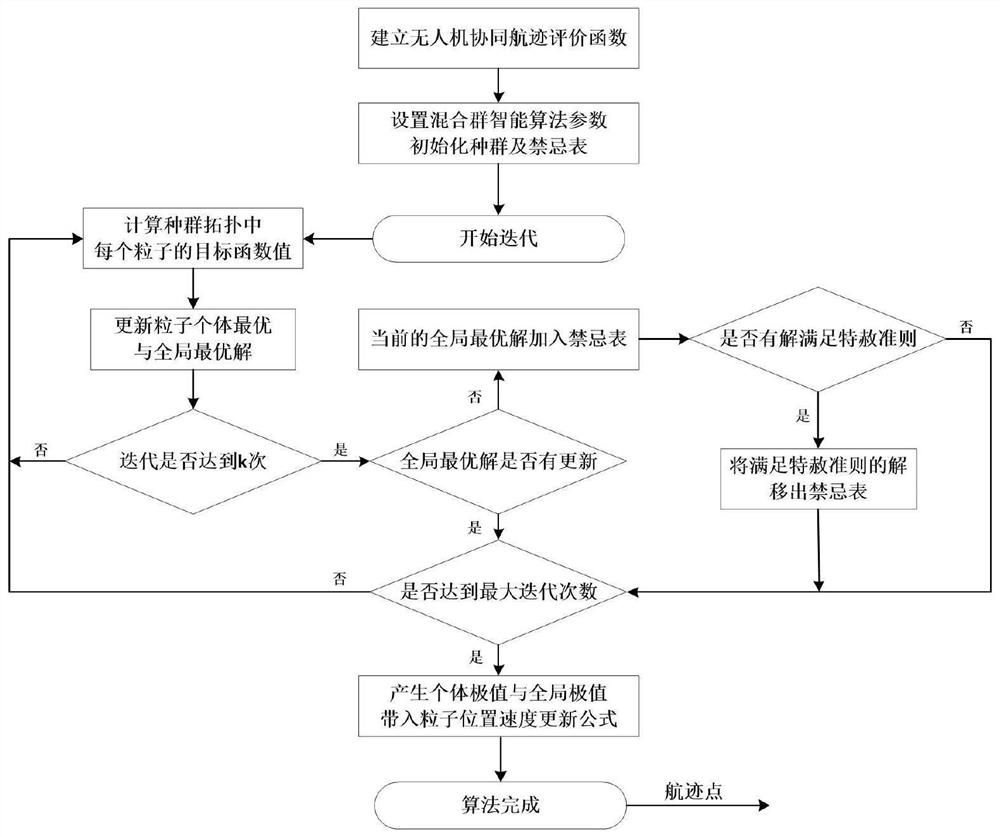
[0031] A method for controlling unmanned aerial vehicle cooperative track based on mixed swarm intelligence algorithm, comprising the following steps:
[0032] (1) Taking the six elements of flight range, flight height, distance between UAV and obstacle area, turning radius, climbing angle, and distance between aircraft as constraint items to form an evaluation function for UAV cooperative trajectory;
[0033] (2) Set the relevant parameters of the mixed group intelligent algorithm: learning factor c 1 and c 2 , inertia weight factor ω, particle population size N s , the particle maximum flight speed v max and tabu table size M, given the initial position and velocity of the UAV, initialize the particle population and tabu table, and set the maximum number of iterations of the algorithm;
[0034] (3) Start the iteration, judge the space position of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com