

Forestry fruit tree hovering picking robot
A technology for picking robots and fruit trees. It is applied in picking machines, agricultural machinery and tools, and agriculture. It can solve the problems of personnel falling, waste, and fruit breaking, etc., and achieve the effect of improving safety and stabilizing the climbing effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
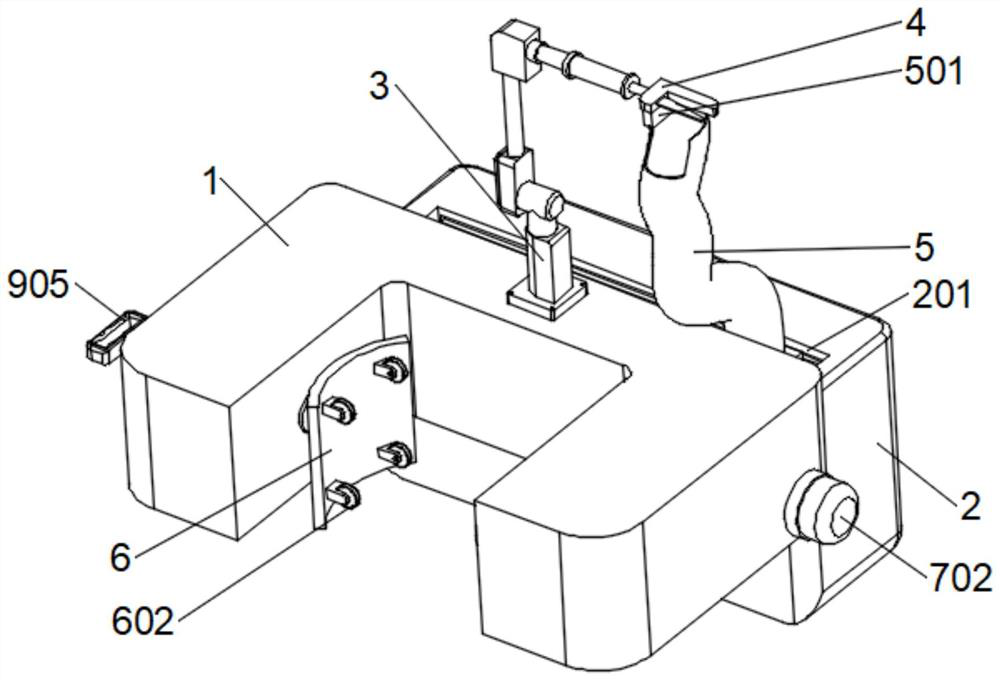
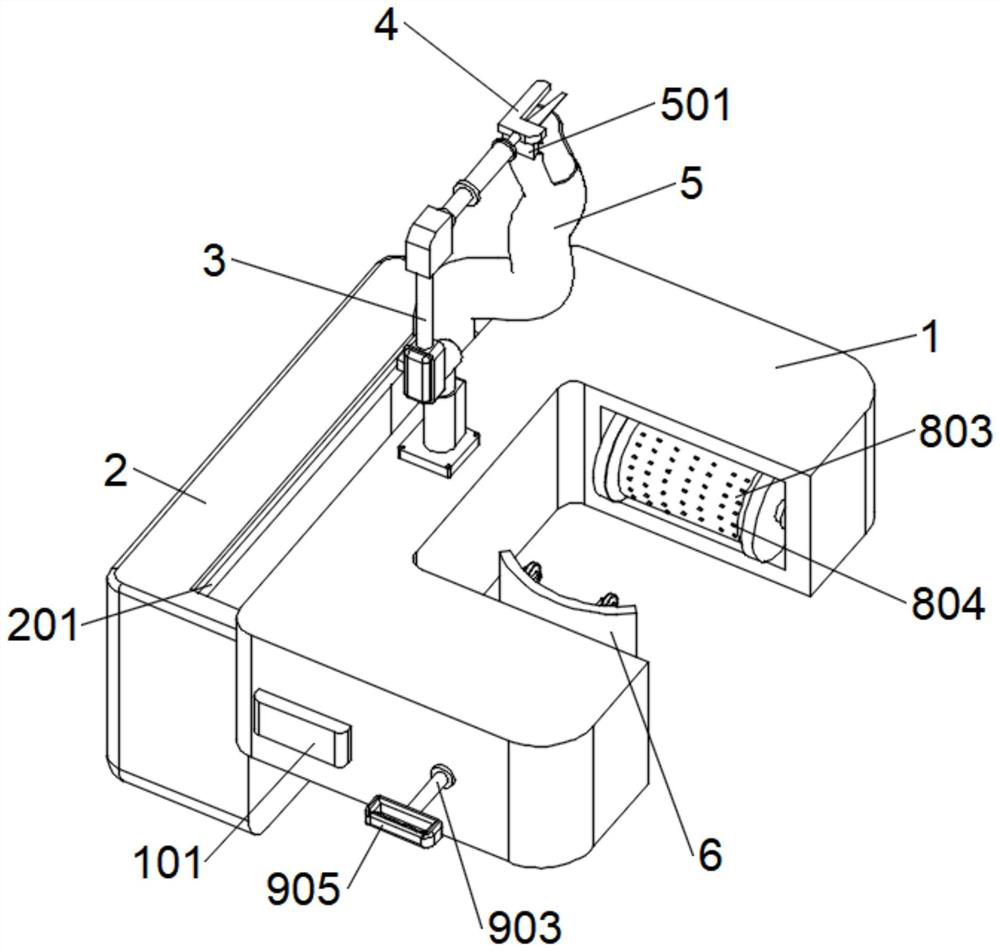
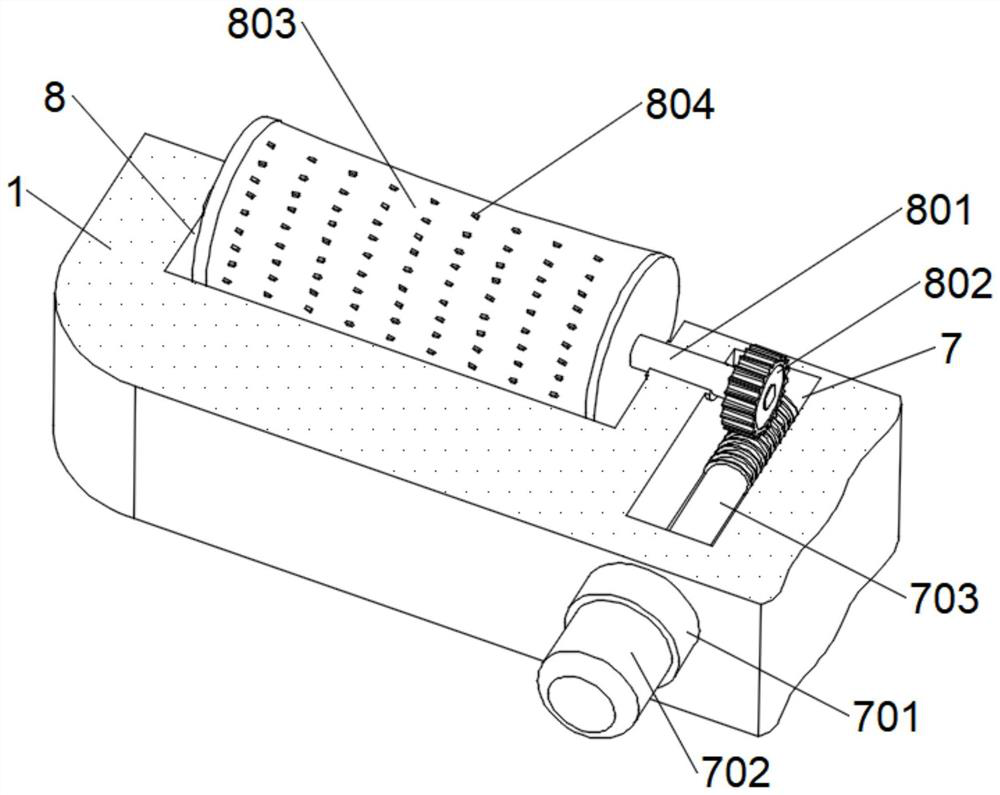
[0037] see Figure 1-7 , the present invention provides an embodiment:
[0038]A hovering picking robot for forestry fruit trees, comprising a U-shaped lifting platform 1, a holding basket 2, a serpentine bellows 5 and an arc-shaped clamping plate 6, a PLC controller 101 is fixed on the left surface of the U-shaped lifting platform 1, and the The basket 2 is fixedly installed on the rear side surface of the U-shaped lifting platform 1, and the interior of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More