

Planar laser SLAM and navigation method based on compressed three-dimensional space point cloud
A plane laser, three-dimensional space technology, applied in two-dimensional position/channel control, image data processing, instruments, etc., can solve the problems of high real-time performance and low calculation amount of plane laser SLAM, so as to improve accuracy and improve obstacles. The effect of recognition ability and safety improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
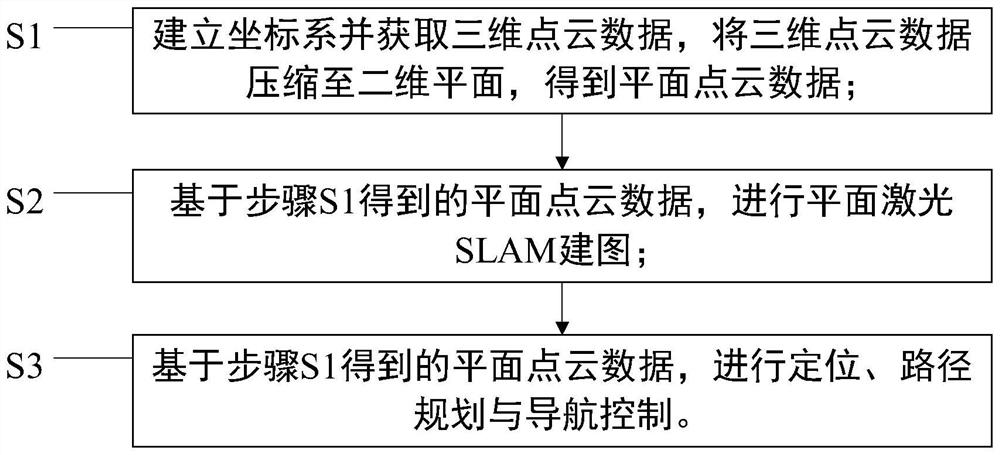
[0043] Such as figure 1 As shown, a kind of planar laser SLAM and navigation method based on compressed three-dimensional space point cloud of the present invention comprises the following steps:
[0044] S1. Establish a coordinate system and obtain 3D point cloud data, compress the 3D point cloud data to a 2D plane, and obtain plane point cloud data;
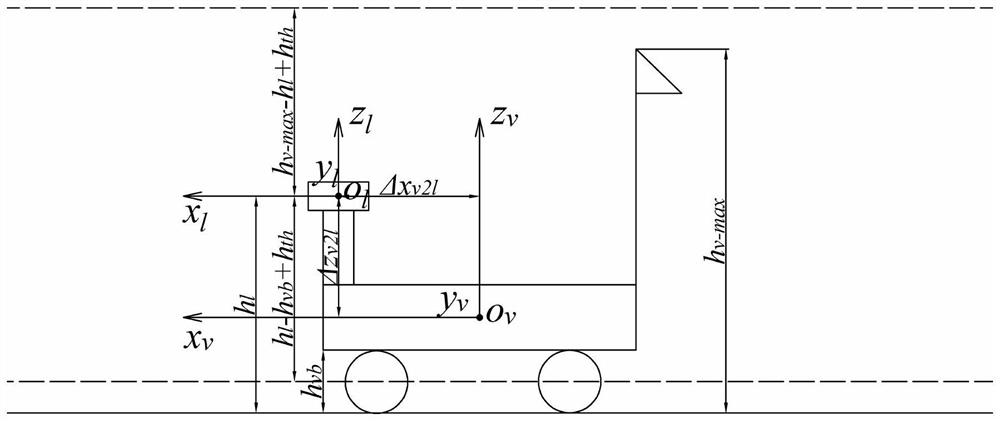
[0045] S1.1 Establish the mobile robot coordinate system {v} and the lidar coordinate system {l} to obtain basic data;
[0046] Such as figure 2 As shown, take the center of the main body of the mobile robot as the origin o v , x v The axis points to the front of the mobile robot, y v axis parallel to the wheel axis pointing to the left, z v The axis points vertically upwards to establish a mobile robot coordinate system that satisfies the right-hand rule o v x v the y v z v , recorded as {v}....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More