System and method for automatically identifying distance between steel bars to achieve straightening and deviation rectifying
A technology of steel bar spacing and automatic identification, applied in the field of steel bar binding, can solve the problems that the robot cannot continue to walk, and the position of the steel bar cannot be adjusted.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
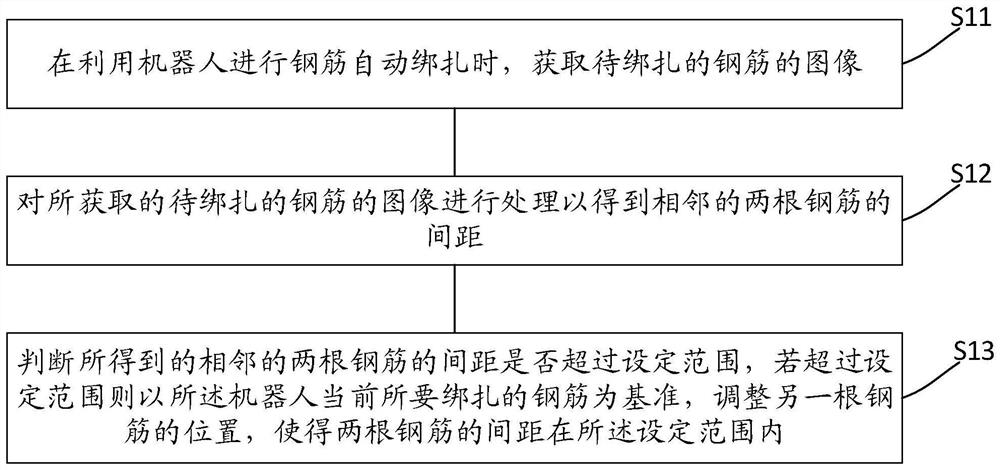
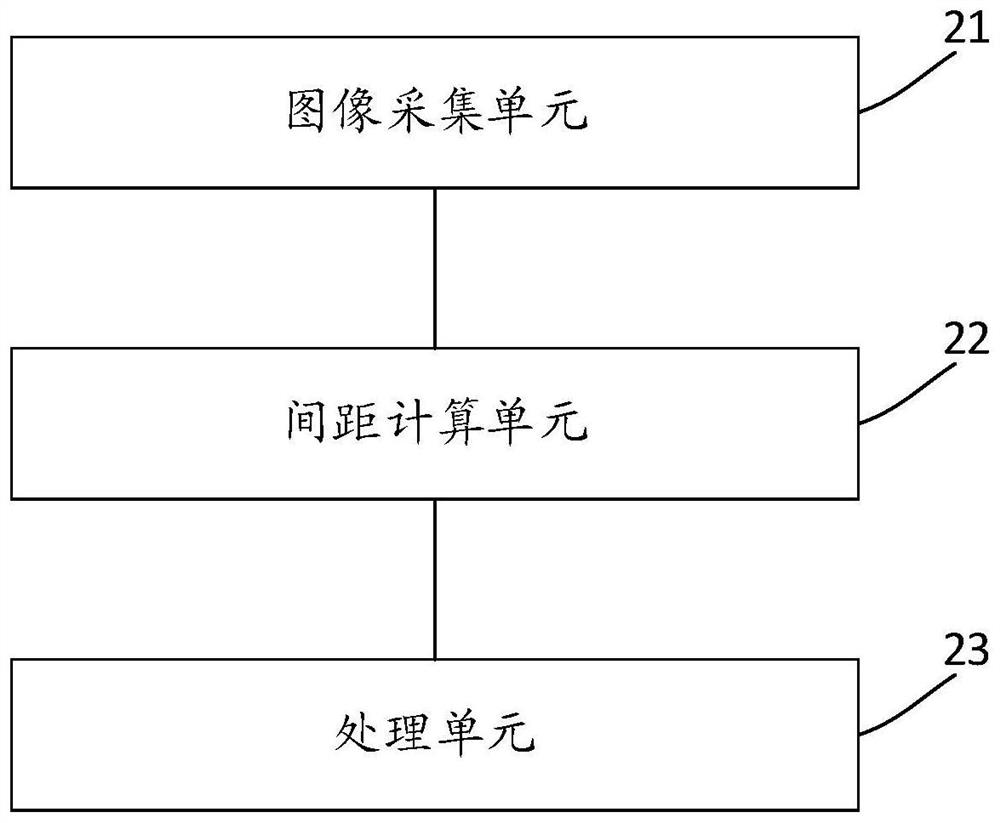
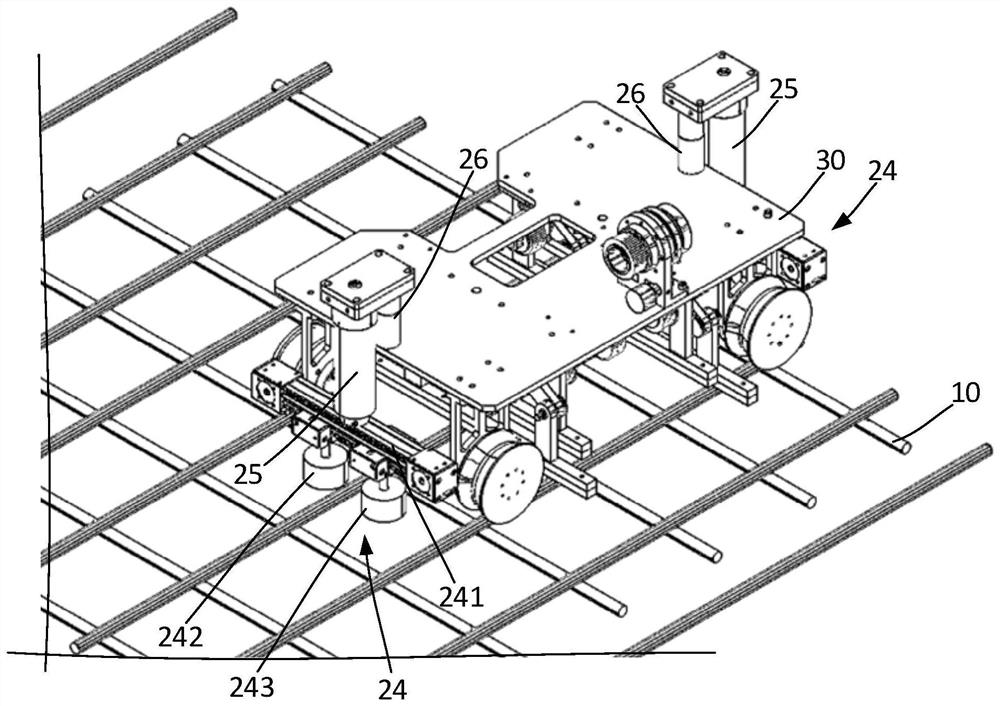
[0039] refer to figure 1 , the present invention provides a system and method for automatically identifying the spacing of steel bars to achieve straightening and deviation correction, which can provide the functions of steel bar straightening and deviation correction for automatic steel bar binding robots, and can automatically correct deviations of steel bars when it is found that the steel bars are offset , to ensure that the location of the steel bars is accurate, on the one hand, it can ensure the binding quality of the steel bars, on the other hand, it can ensure that the robot can walk along the steel bars smoothly, avoiding the robot's inability to walk due to the deviation of the steel bars, and without manual intervention, the whole process is fully automated. It has high practical use value. The system and method for automatically i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More