

Evaluation method and device for automatic driving prediction module
A prediction module and autonomous driving technology, applied in instruments, data processing applications, manufacturing computing systems, etc., can solve the problems of time-consuming and labor-intensive, evaluation deviation, low efficiency, etc., achieve reasonable and effective evaluation results, reduce evaluation differences, persuasive effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] In order to make the content of the present invention more clearly understood, the present invention will be further described in detail below based on the specific embodiments and in conjunction with the accompanying drawings.
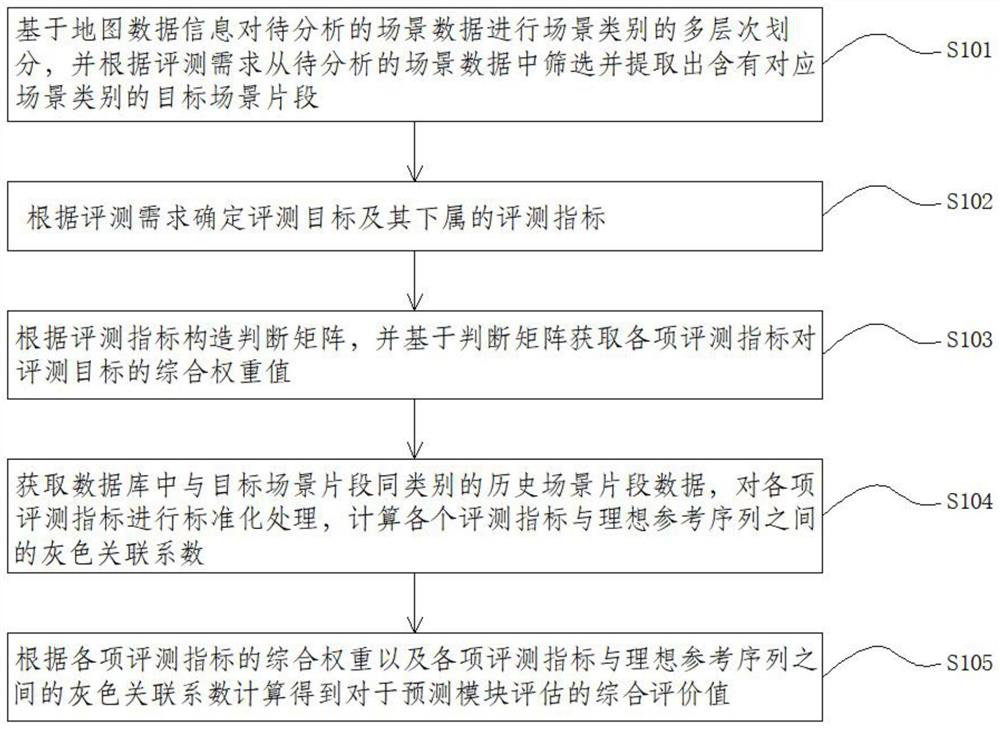
[0049] see figure 1 ,figure 1 This embodiment provides a schematic flowchart of a method for evaluating an automatic driving prediction module, including steps S101 to S105. The specific steps are as follows:
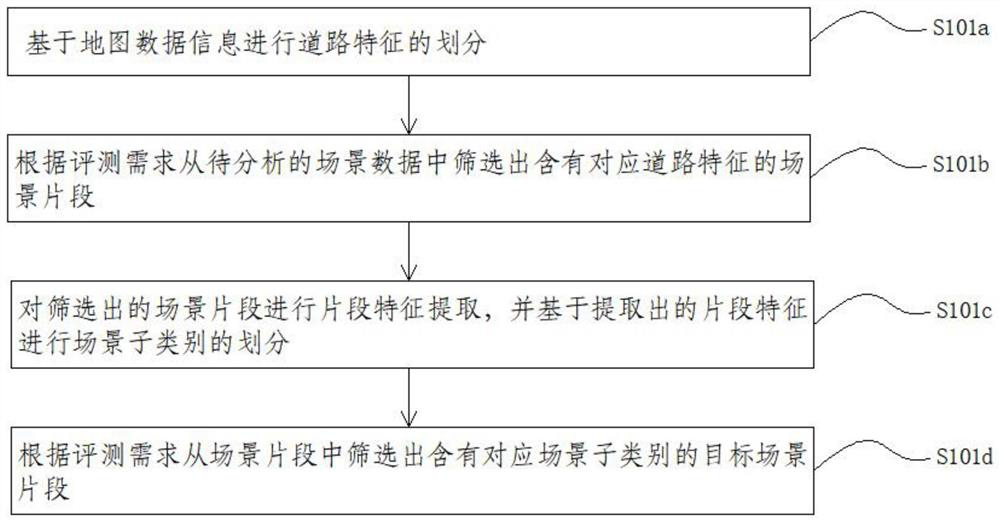
[0050] Step S101: Based on the map data information, perform multi-level classification of the scene data to be analyzed, and screen and extract target scene fragments containing corresponding scene categories from the scene data to be analyzed according to evaluation requirements. Specifically include the following steps:
[0051] Step S101a: Carry out road feature division based on map data information.
[0052] Specifically, according to the connected high-precision map data, the road characteristics of the vehicle at different tim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More