

Robot avoidance method and device and storage medium
A robot and object technology, applied in the direction of manipulators, program-controlled manipulators, advanced technology, etc., can solve problems such as high requirements for visual conditions, large deviations in observation angles, and difficulties in identifying methods smoothly, so as to improve flexibility and intelligence sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The preferred embodiments of the present invention will be described below with reference to the accompanying drawings. It should be understood that the preferred embodiments described herein are only used to illustrate and explain the present invention, but not to limit the present invention.
[0024] The invention provides a robot avoidance method, equipment and storage medium. By using wireless beacons to detect and identify specific objects in the working environment where the robot runs, the purpose of avoiding the specific objects is achieved, and the environment interaction of the robot is improved. Provides the corresponding technical basis.
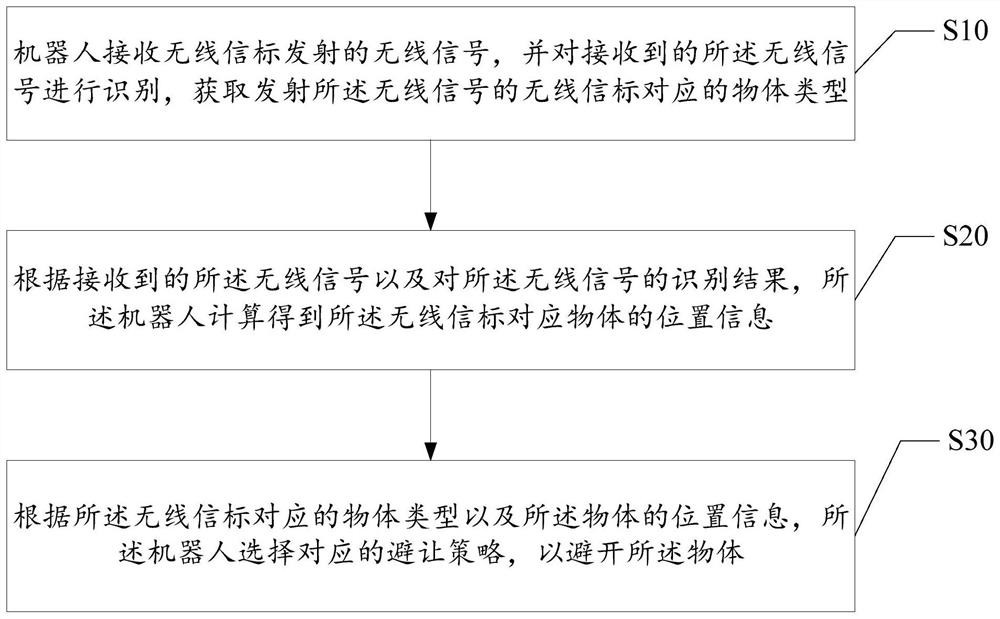
[0025] like figure 1 shown, figure 1 This is a schematic flowchart of an embodiment of the robot avoidance method of the present invention; the robot avoidance method of the present invention can be implemented as steps S10-S30 described below.
[0026] Step S10: The robot receives the wireless signal transmitted by the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More