

Method and device for planning shortest path of unmanned aerial vehicle
A shortest path, UAV technology, applied in three-dimensional position/channel control, vehicle position/route/altitude control, instruments, etc., can solve the problem of low timeliness of path planning and can not meet the safety and speed of UAV route re-planning. requirements, etc., to achieve the effect of fast and accurate acquisition, and increase the calculation speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Example Embodiment
[0021]实施例1:
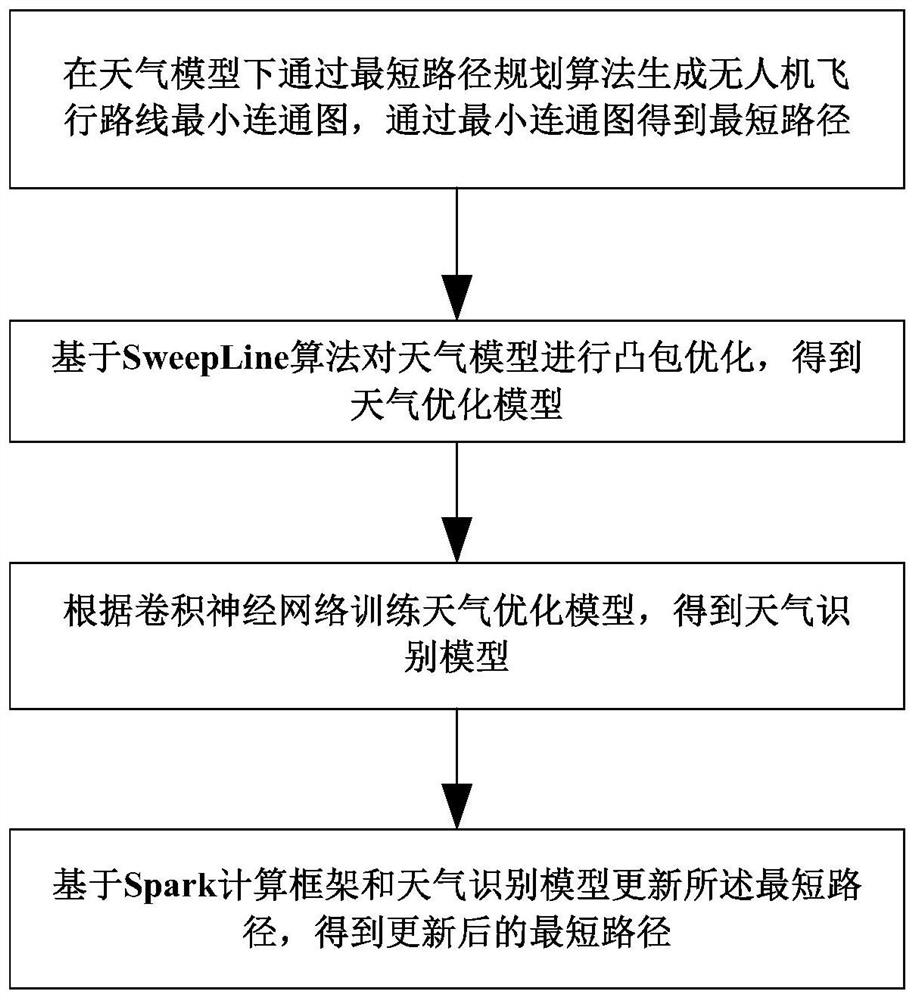
[0022]如图1所示,一种无人机最短路径规划方法,包括如下步骤:
[0023]在天气模型下通过最短路径规划算法生成无人机飞行路线最小连通图,通过所述最小连通图得到最短路径;
[0024]基于SweepLine算法对所述天气模型进行凸包优化,得到天气优化模型;
[0025]根据卷积神经网络训练所述天气优化模型,得到天气识别模型;
[0026]基于Spark计算框架和所述天气识别模型更新所述最短路径,得到更新后的最短路径。
[0027]上述实施例中,无人机在飞行过程中能够通过天气模型自动探测前方禁飞区域,对其优化和校准,基于Spark计算框架和天气识别模型能够动态调整最短路径,通过启发式凸包优化最短路径,结合Spark计算框架提高计算速度,快速且准确得到最短路径。
[0028]具体地,所述在天气模型下通过最短路径规划算法生成无人机飞行路线最小连通图,具体为:
[0029]在所述天气模型中确定禁飞区域,并根据禁飞区域获得到禁飞区域的凸点坐标集合,输入无人机的起始坐标和终点坐标,通过最短路径规划算法、所述起始坐标、所述终点坐标和所述凸点坐标集合得到可行线段集合,根据可行线段集合构建拓扑结构,在所述拓扑结构中确定最小路径权值对应的节点作为遍历的起点,将所述拓扑结构中所有的点进行遍历,根据遍历结果生成无人机飞行路线最小连通图。
[0030]应理解地,传统的最短路径规划算法,主要研究点与点之间的加权最小连通图,而没有考虑在禁飞区存在的情况下,如何构建飞行路线的最短路径。禁飞区存在的情况,需要大量的空位位置关系判断来获取可行路线。
[0031]本发明拟研究不良天气下无人机的飞行路线最小连通图问题。首先,构建地理几何天气模型,获取禁飞区域的坐标信息。然后,获取禁飞区的凸点坐标集合,根据起始位置和终点位置与凸点坐标集合的连通性——线段相连,不进入禁飞区域,构建最小连通图。最小连通图的权重是坐标之间的实际空间距离,本发明拟设计自适应的坐标系转换方法,支持火星坐标系、谷歌WGS-84坐标系相互转换。
[0032]上述处理过程为HDP算法过程:基于启发式的HDP算法坐标转换:本发明进行计算两点间距离前还需进行坐标转换,并对无法确定获取数据坐标系类型时使用百度和高德提供的经纬度反查工具。
[0033]输入、输出、参数、过程介绍:
[0034]输入:无人机起始位置s
[0035]目的位置e
[...
Example Embodiment
[0135]实施例2:
[0136]如图2所示,一种无人机最短路径规划装置,其特征在于,包括:
[0137]生成模块,用于在天气模型下通过最短路径规划算法生成无人机飞行路线最小连通图,通过所述最小连通图得到最短路径;
[0138]优化模块,用于基于SweepLine算法对所述天气模型进行凸包优化,得到天气优化模型;
[0139]构建模块,用于根据卷积神经网络训练所述天气优化模型,得到天气识别模型;
[0140]更新模块,用于基于Spark计算框架和所述天气识别模型更新所述最短路径,得到更新后的最短路径。
[0141]具体地,所述生成模块具体用于:
[0142]在所述天气模型中确定禁飞区域,并根据禁飞区域获得到禁飞区域的凸点坐标集合,输入无人机的起始坐标和终点坐标,通过最短路径规划算法、所述起始坐标、所述终点坐标和所述凸点坐标集合得到可行线段集合,根据可行线段集合构建拓扑结构,在所述拓扑结构中确定最小路径权值对应的节点作为遍历的起点,将所述拓扑结构中所有的点进行遍历,根据遍历结果生成无人机飞行路线最小连通图。
[0143]具体地,所述优化模块具体用于:
[0144]当所述无人机绕禁飞区域边缘飞行时,将所述禁飞区域抽象为多边形,并将所述禁飞区域的多边形转换为凸包,并通过叉积算法判断所述凸包内部的点是否为非凸包点,将所述非凸包点删除,并确定所述凸包的多个边缘点,根据各个所述边缘点的连线得到不可行路径集合,通过所述不可行路径集合的差集得到新的可行路径集合,根据所述新的可行路径集合得到天气优化模型。
[0145]具体地,所述构建模块具体用于:
[0146]根据卷积神经网络LeNet-5训练所述天气优化模型,得到天气识别模型:通过所述天气识别模型获得天气图像;所述卷积神经网络LeNet-5包括输入层、第一层神经网络、第二层神经网络和输出层,并将所述第一层神经网络的神经元设置为128个,将所述第二层神经网络的神经元设置为5个,并通过Relu激活函数和Softmax激活函数对导入所述输入层的所述天气图像进行训练,通过所述输出层输出天气识别模型。
[0147]具体地,所述更新模块具体用于:
[0148]构建所述Spark计算框架,并配置所述Spark计算框架的Spark Application运行环境;
[0149]创建数据表,所述数据表用于记录所述天气识别模型识别的禁飞区域信息和无人机飞行数据;
[015...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More