

Robust control method for flexible assembly system containing single unreliable resource
A flexible assembly and robust control technology, applied in the direction of adaptive control, comprehensive factory control, general control system, etc., can solve problems such as ineffectiveness and unattainable control objectives, and achieve high permissibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 3
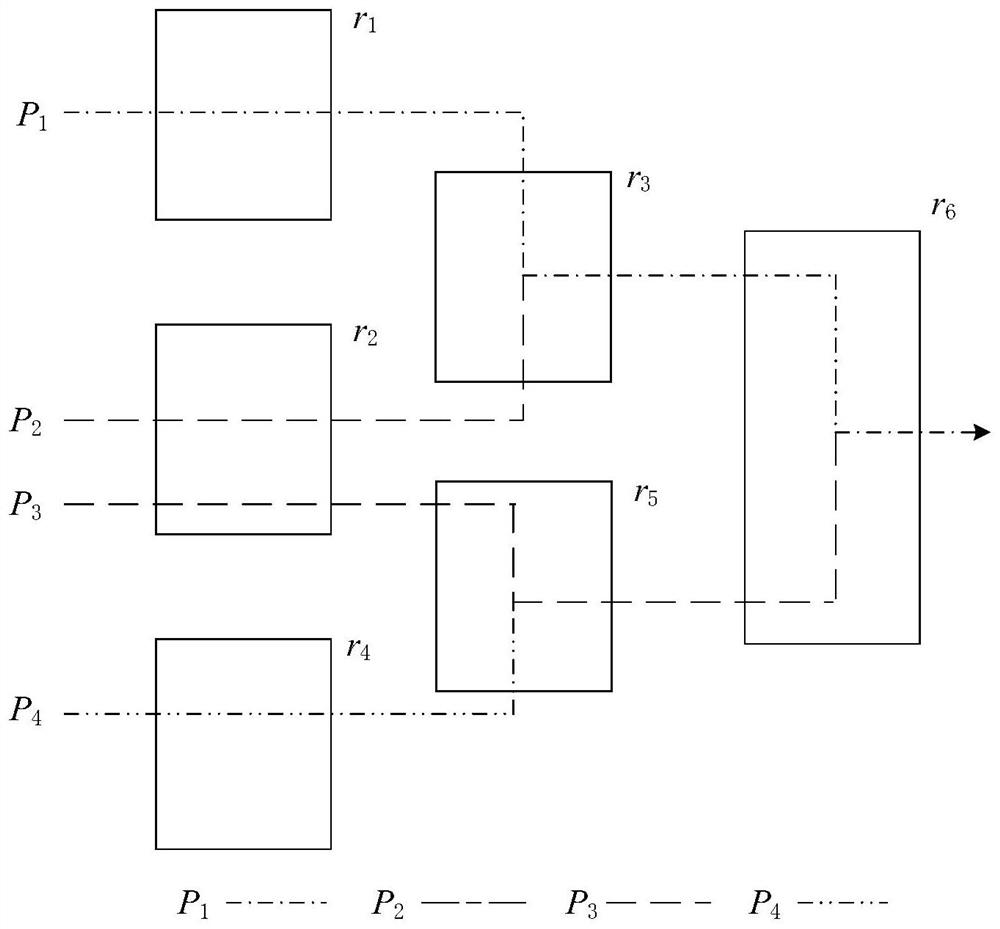
[0279] Example 3: Consider automatic manufacturing system S, suppose R={r 1 ,r 2 ,…,r 6 },P={P 1 ,P 2 ,…,P 4 },l 1 =l 2 =l 3 =l 4 =3. P 1 The operation is P 11 ,P 12 ,P 13 , P 2 The operation is P 21 ,P 22 (P 12 ), P 23 (P 13 ), P 3 The operation is P 31 , P 32 ,P 33 (P 13 ), P 4 The operation is P 41 ,P 42 (P 32 ), P 43 (P 13 ). ρ(P 11 )=r 1 ,ρ(P 12 )=r 3 ,ρ(P 13 )=r 6 ,ρ(P 21 ) = r 2 ,ρ(P 31 )=r 2 ,ρ(P 32 )=r 5 ,ρ(P 41 )=r 4 .ψ 1 =ψ 2 =ψ 3 =ψ 4 =ψ 5 =ψ 6 =4. Suppose r 6 is an unreliable resource. An overview of the system is shown in image 3 . P a ={P 12 ,P 32 ,P 13 }. P a (P 1e )=θ(P 1e )∩P a ={P 11 ,P 12 ,P 13 }∩P a ={P 12 ,P 13 }. because P 12 ∈P a1 (P 1e ). Because θ(P 13 )∩P a ={P 11 ,P 12 }∩{P 12 ,P 32 ,P 13 }=P 12 , Therefore, P a1 (P 1e )={P 12 }. because, P a2 (P 1e )={P 13 }. because So P 32 ∈P a1 (P 3e ). because So P a1 (P 3e )={P 32 }. Similarly, we c...
example 4
[0281] Example 4: Consider image 3 Automatic manufacturing system in . Suppose the current state of the system is q=1+x 11 +x 12 +x 31 , D 1 ={P 11 ,P 12 ,P 31 },D 2 ={1,1,1},D 3 ={P 13 ,P 13 ,P 13 }. Initially, Φ[1]=Φ[2]=Φ[3]=Φ[4]=0;
[0282] given P 12 ∈P a1 ,Π(P 12 )={P 11 ,P 21 },D 1 [1]=P 11 ∈Π(P 12 ), let z=max{q(x 11 )+q(y 11 ), q(x 21 )+q(y 21 )}=1. Then, Φ[1]=0+1-1=0, Φ[2]=0+1-0=1. set q(x 21 )=1, get q=1+x 11 +x 12 +x 21 +x 31 . Assembly at stage P 11 and P 21 the workpiece 1 time, get q=1+2x 12 +x 31 . Since there is no artifact at stage P 32 , so the assembly is obtained at stage P 12 The workpiece on cannot be moved to P 13 superior. because P 12 ∈γ 12 and P 12 ∈Π a , the assembly obtained at stage P 12 The workpiece on it has not been moved temporarily. Let D 1 [1]=P 12 ;
[0283] given P 32 ∈P a1 ,Π(P 32 )={P 31 ,P 41 },D 1 [3]=P 31 ∈Π(P 32 )}, let z=max{q(x 31 )+q(y 31 ),q(x 41 )+q(y 41 )}=1. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More