

Fall detection method and fall protection method for foot type desktop pet robot
A detection method and robot technology, which is applied in the field of robots, can solve problems such as damaged steering gears, abnormal use of robots, and drops, and achieve the effect of improving reliability and durability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0020] A drop detection method for a foot-type desktop pet robot, the specific contents are as follows:
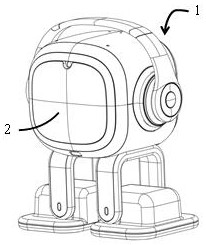
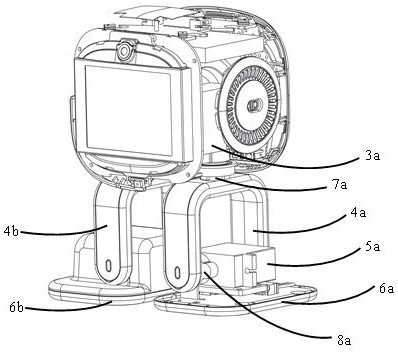
[0021] like figure 1 and figure 2 As shown, the footed desktop pet robot 1 includes a head 2, a left leg steering gear 3a, a left leg 4a, a left foot steering gear 5a, a left foot 6a, a right leg steering gear 3b, a right leg 4b, a right foot steering gear 5b, right foot 6b;
[0022] The left and right sides of the inner lower end of the head 2 are respectively fixedly connected to a left-leg steering gear 3a and a right-leg steering gear 3b; The shaft 8a of the left-foot steering gear 5a is connected by bolts, and the left-foot steering gear 5a is fixedly connected to the left foot 6a; the shaft 7b of the right-leg steering gear 3b is connected with the right leg 4b through bolts, and the lower end of the right leg 4b is connected with the right foot rudder through bolts The rotating shaft 8b of the machine, the right foot steering gear 5b is fixedly connected to the ...
specific Embodiment approach 2
[0024] A fall protection method for a foot-type desktop pet robot, the specific contents are as follows:
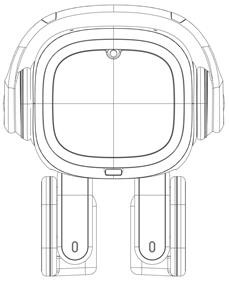
[0025] like image 3 As shown, when the robot judges that it is in a falling state, it performs a fall protection action; the left foot 6a is rotated by an angle counterclockwise relative to the left leg 4a through the left foot steering gear 5a, so that the upper cover of the left foot 6a is completely connected to the outside of the left leg 4a. Fitting; the right foot 6b rotates an angle clockwise relative to the right leg 4b through the right foot steering gear 5b, so that the upper cover of the right foot 6b is completely fitted to the outside of the right leg 4b; if the upper body of the robot touches the ground, the robot foot The steering gear is completely immune to impact and will not damage the steering gear; if the lower body of the robot touches the ground, the impact on the robot's feet will mainly act on the left-foot steering gear shaft 8a or the right-foo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More