Integrated control method and system for lane keeping and lane changing of self-driving automobile
A technology of automatic driving and lane keeping, which is applied in the field of control methods and systems for autonomous vehicles, can solve problems such as the complexity of the automatic driving control system, and achieve the effect of improving the adaptability of complex scenes, strong functions, and speeding up the development speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
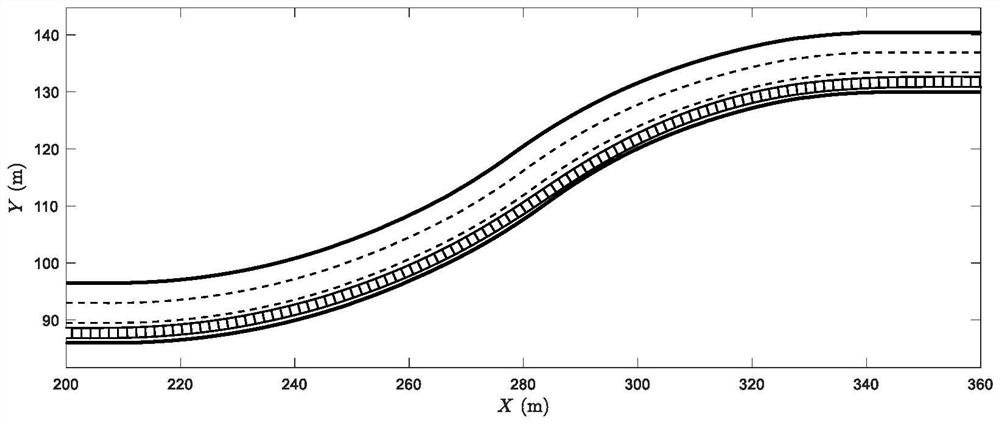
[0078] Example 1: Lane Keeping Driving in Curves
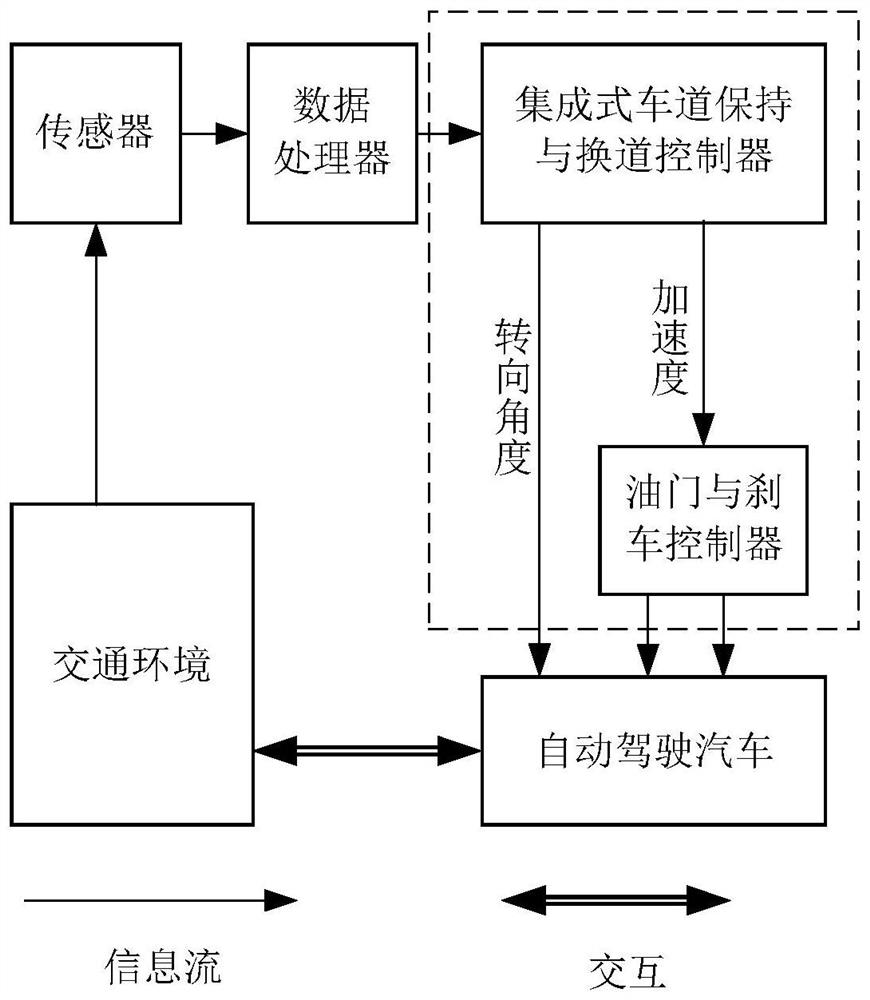
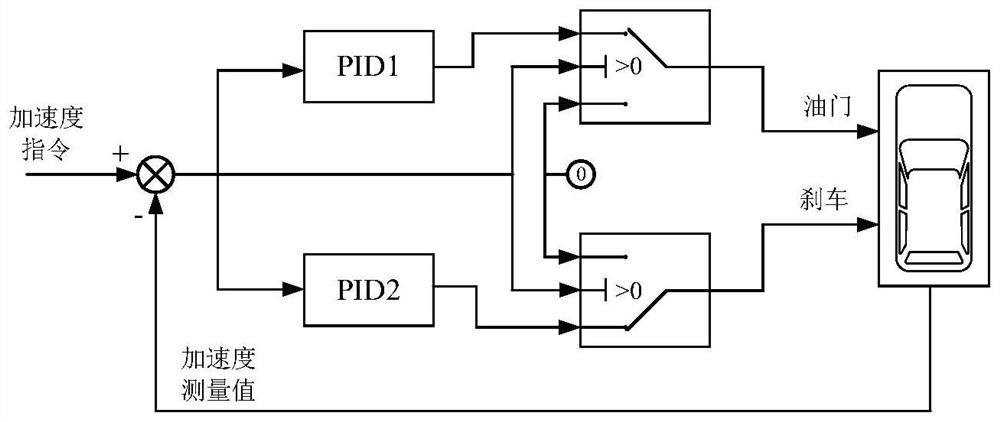
[0079] In this scenario, the road consists of a straight section and an S-curve. The controlled autonomous vehicle starts from the far right lane of the straight road section at a speed of 16m / s. During the driving process, the on-board sensors collect the lane line information and the information of the vehicle ahead at a frequency of 20Hz and transmit it to the data processor. The set of coordinates of the lane center reference point in the next 2 seconds is obtained through the data processor, which is used as the reference trajectory of automatic driving, and then input into the integrated lane keeping and lane changing controller model for solving, and the steering angle of the automatic driving vehicle is obtained. Control commands and acceleration control commands. Finally, the steering angle control command is directly transmitted to the self-driving car, the acceleration control command is transmitted to the self-dri...
Embodiment 2
[0081] Example 2: Changing lanes on a straight road
[0082] In this scenario, the accused self-driving car is driving on a straight road with three lanes. The controlled self-driving car starts from the middle lane of the three lanes, and the initial speed is 16m / s. At the same time, there is a human-driven car in the same lane in front of it. The forward speed is 10m / s. The distance between the two cars is 250m at the initial moment. When the driving speed of the two cars is constant, the distance between the controlled self-driving car and the car in front will gradually decrease. In order to avoid collision with the car in front, the controlled self-driving car chooses to drive to the adjacent lane. During the driving process, the on-board sensor of the autonomous vehicle collects the lane line information and the information of the vehicle ahead at a frequency of 20Hz and transmits it to the data processor; The processor obtains the planned autonomous driving reference t...
Embodiment 3
[0084] Example 3: Overtaking
[0085] In this scenario, the controlled self-driving car is traveling at a speed of 16m / s in the middle lane, a car traveling in the same direction in the same lane ahead is traveling at a speed of 10m / s, and the distance between the two cars is 60m at the initial moment. At the same time, there is another car in the left lane driving forward at a speed of 10m / s. At this time, this car is outside the sensing range of the on-board sensors of the controlled self-driving car. In order not to collide with the car in front, the controlled self-driving car chooses to change lanes to the left lane to continue driving. During the driving process, the on-board sensor of the self-driving car collects the lane line information and the information of the vehicle ahead at a frequency of 20Hz and transmits it to the data processing. According to the second case of the automatic driving reference trajectory generation method when the automatic driving car needs...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com