Disparity map construction using guide nodes
A disparity map and node technology, applied in the field of stereo vision, can solve problems such as disparity map waveform distortion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Embodiments of the present invention include providing disparity map construction using guide nodes that can (i) construct disparity maps rapidly; (ii) construct disparity maps accurately; (iii) construct disparity maps at sub-pixel level; (iv) Eliminate waveform distortion in stereo vision; (v) enable real-time stereo vision with low power consumption; (vi) use guide nodes to achieve local range matching for surrounding pixels; (vii) pair is used to calculate the relationship between the reference image and the target image; (viii) 20-30 times faster than block matching operations by reducing computational complexity; (ix) performing a full range search on the center pixel of the guide node and Surrounding pixels near the peak location perform a local range search; and / or (x) are implemented as one or more integrated circuits.
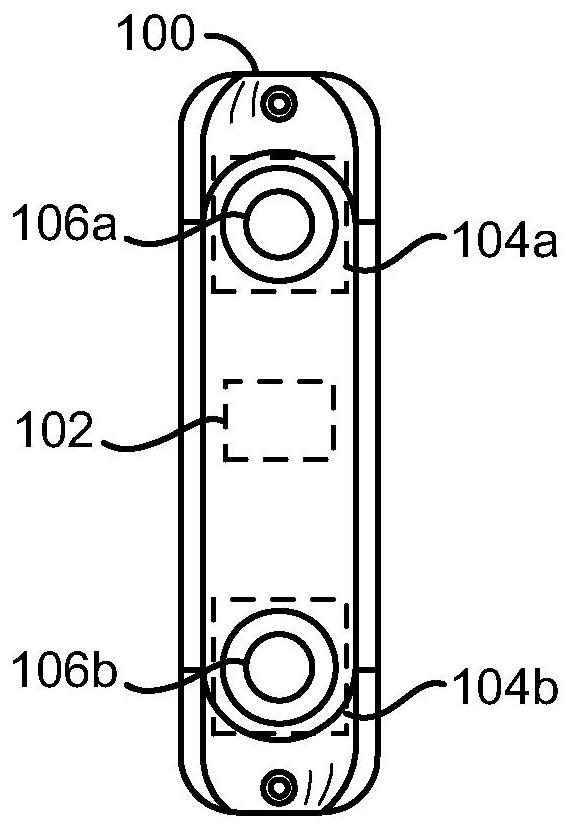
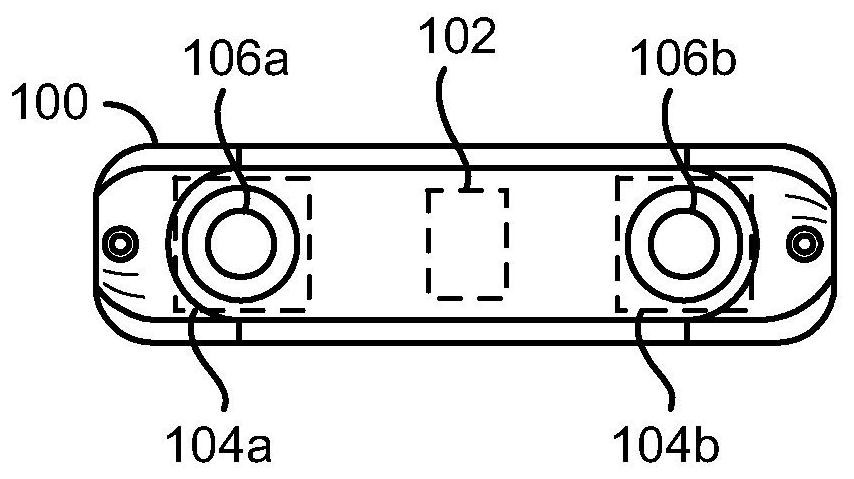
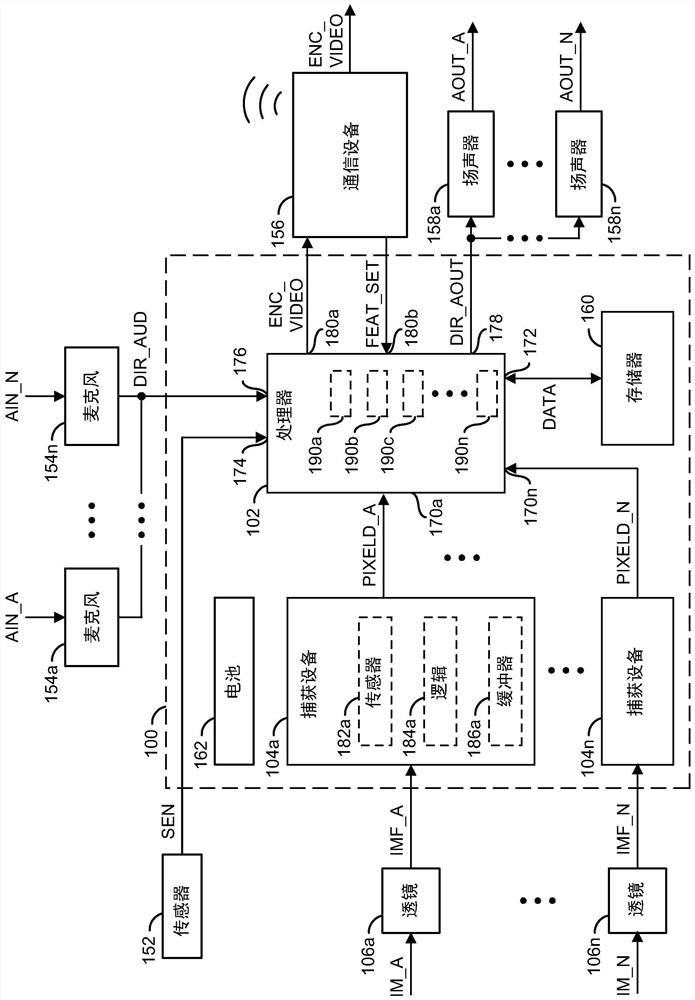
[0022] Embodiments of the present invention may be configured to operate in a system that implements stereoscopic vision. Disparity maps can ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com