

Calibrator matching method and device
A matching method and calibrator technology, which is applied in the field of surgical positioning, can solve problems such as the inability to accurately determine the pose information of the calibrator, and achieve the effect of avoiding matching difficulties and eliminating mismatched feature points
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be further illustrated below in conjunction with the accompanying drawings and specific embodiments.
[0059] In some embodiments, a calibrator for navigating surgery is mounted on the end of a robotic arm of a surgical robot. When using the robot for surgery, the binocular infrared camera is used to collect the left and right view images of the calibrator, and the pose information of the calibrator is obtained through image analysis, so that the optical tracking system of the surgical robot can locate and track the human body posture, so as to realize Tracking and positioning of surgical targets.
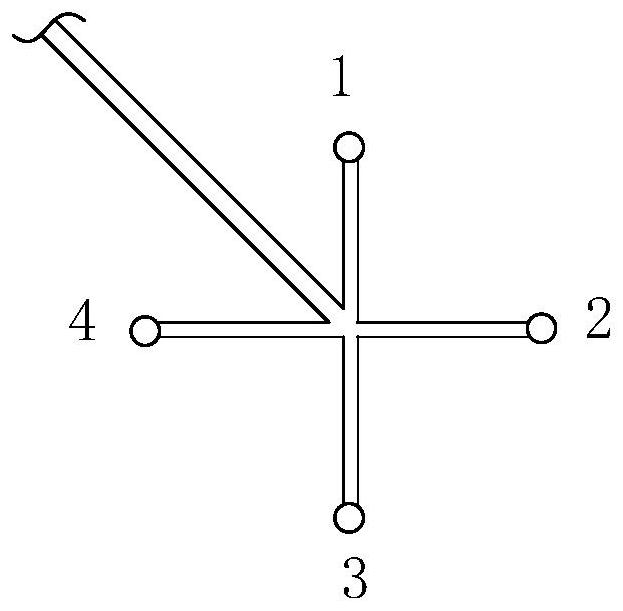
[0060] figure 1 It is a schematic diagram of the structure of the calibrator. The calibrator usually consists of several circular markers. For example, as figure 1 As shown, the calibrator consists of 4 circular markers, and the relative positions between the 4 circular markers are determined. The left and right view images of 4 circular marke...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More