

Anti-sway control of a crane under operator's command
A manipulator, anti-sway technology, applied in the direction of cranes, cranes, load suspension components, etc. of trolleys
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
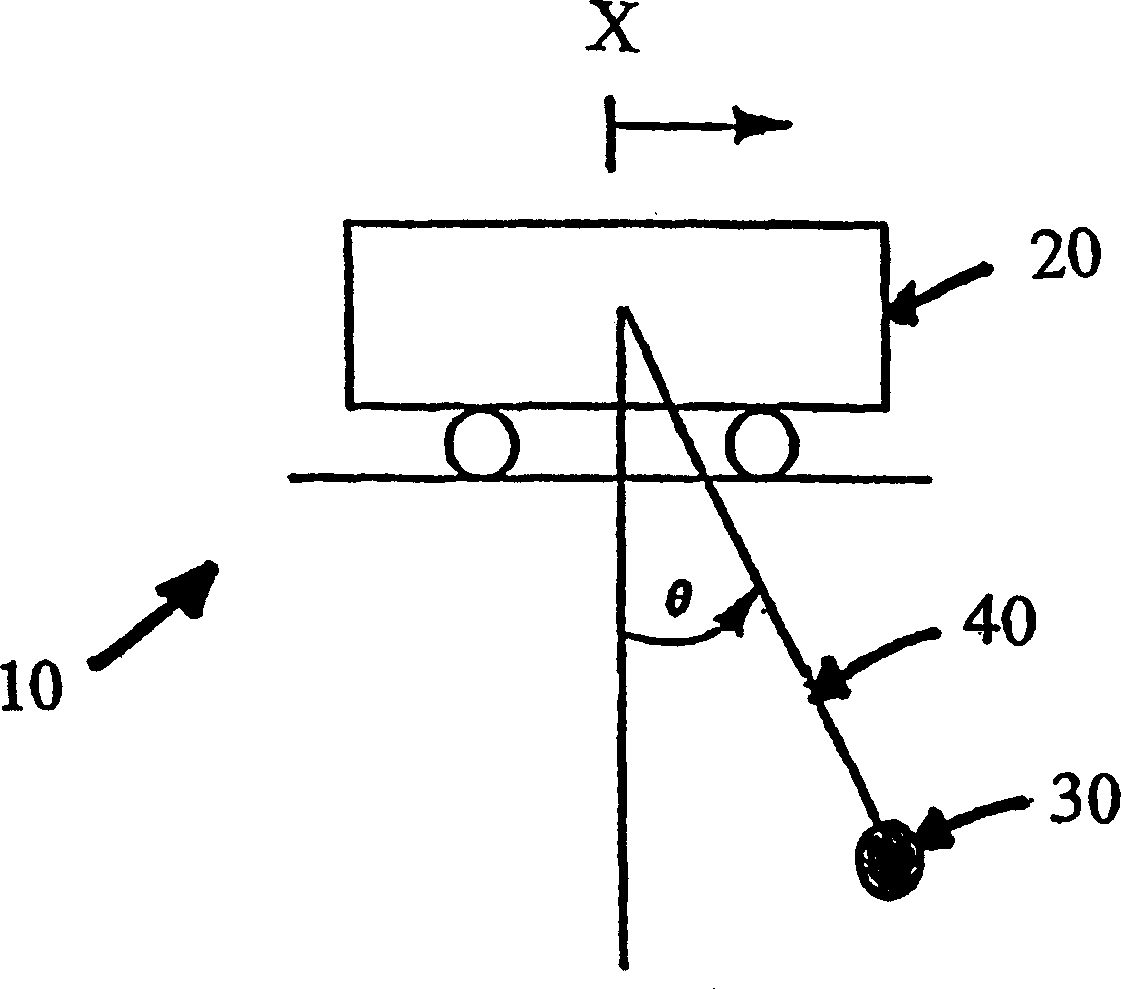
[0031] refer to figure 1 , shows a model of the crane system 10 . Crane system 10 includes a tackle 20 having a hoist (not shown) to adjustably suspend payload 30 by rope 40 . The swing angle θ is generated between the position of the rope 40 at rest and the position of the rope 40 during the swing oscillation. The differential equation describing the development of the sway angle θ of the payload 30 over time is:
[0032] l ( t ) θ . . ( t ) + 2 l . ( t ) θ . ( t ) + g sin θ ( t ) = x . ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More