

Bipedal walking type moving device, and walking control device and walking control method therefor
A technology of a mobile device and a control method, which is applied in the direction of motor vehicles, manufacturing tools, transportation and packaging, etc., can solve the problems of impossible accurate ZMP compensation, difficulty in bipedal walking, and the stability of the robot cannot be maintained, and achieve stability. maintained effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In the following, the invention will be described in detail with reference to suitable forms of embodiments of the invention shown in the drawings.
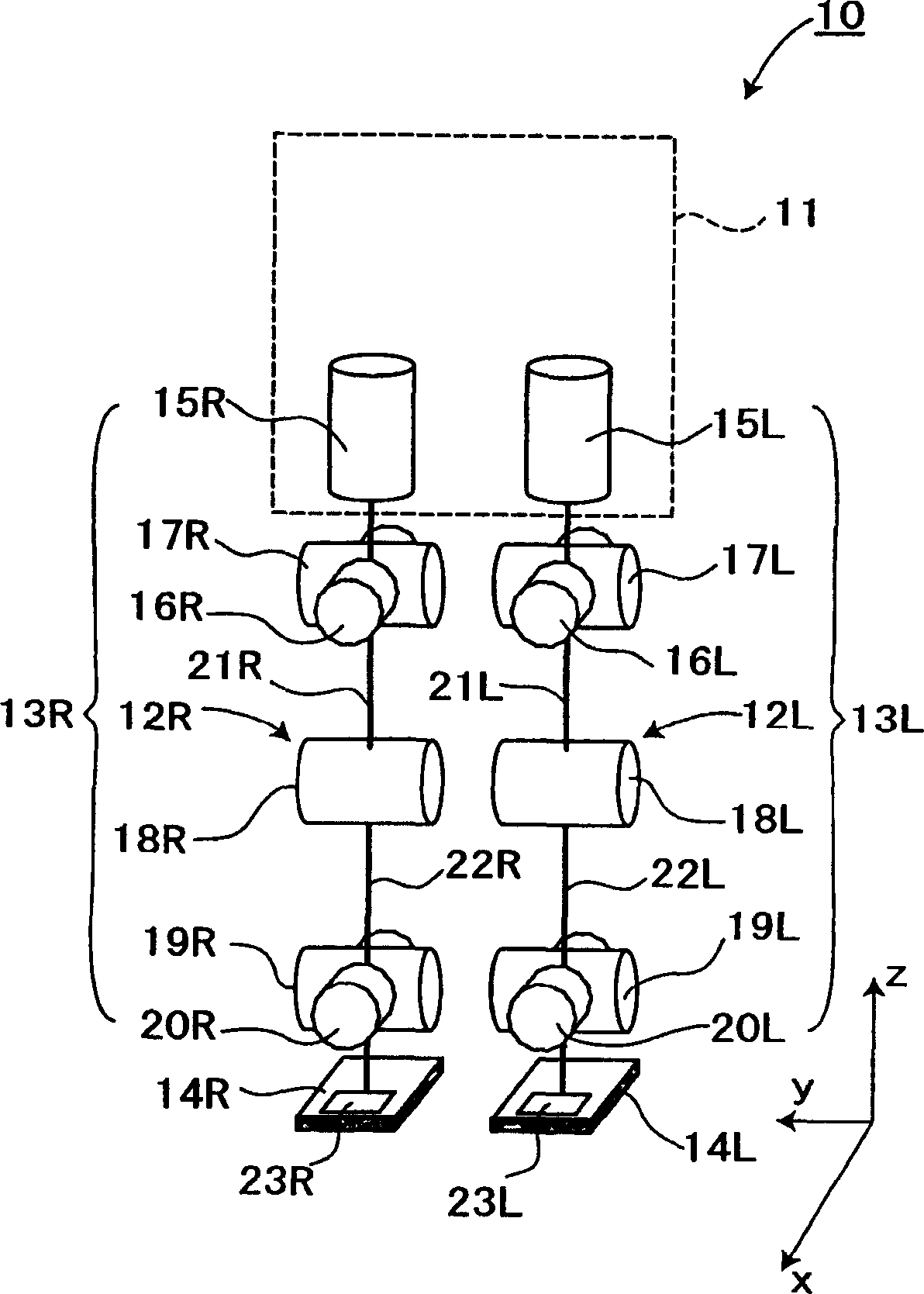
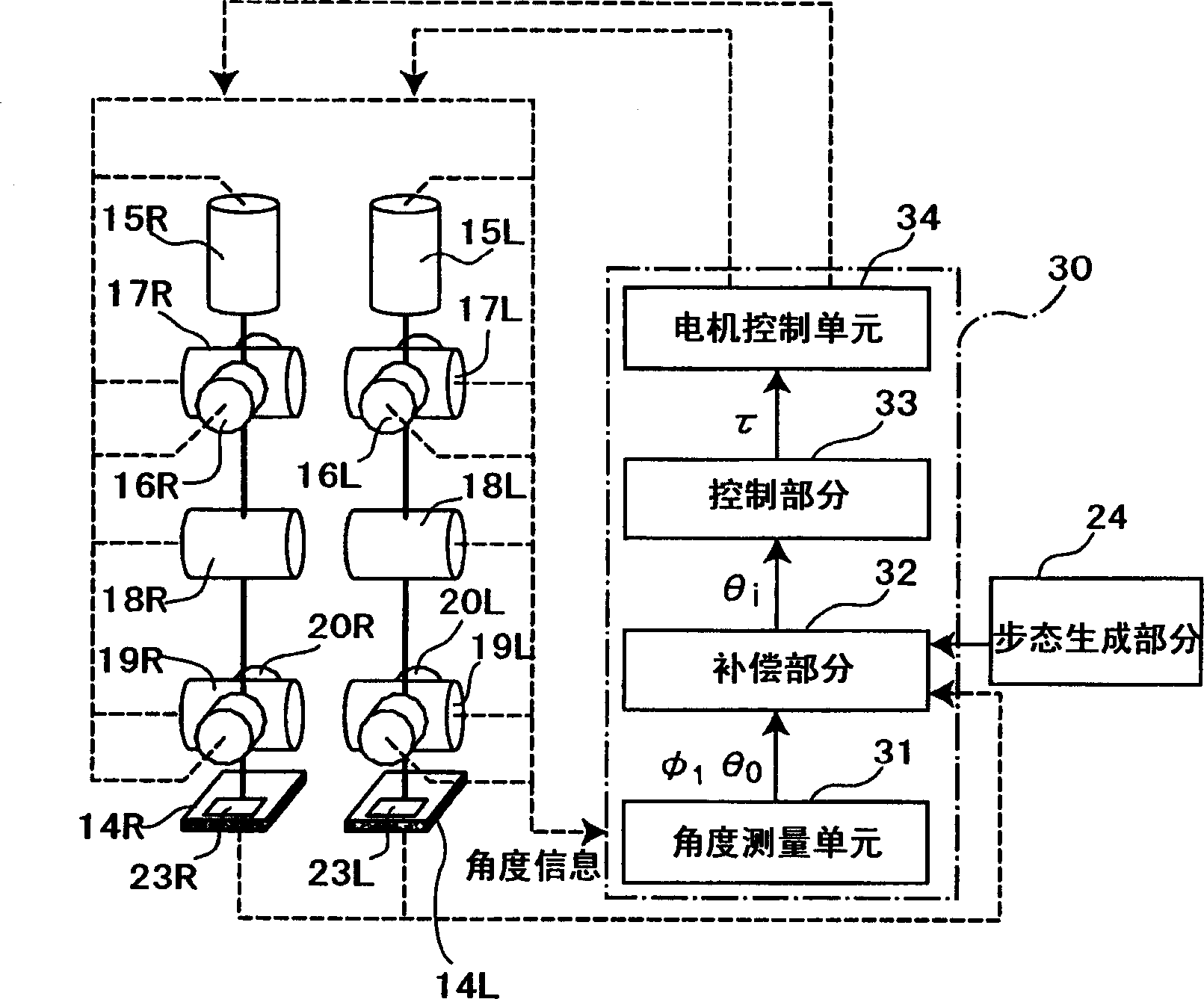
[0026] figure 1 with figure 2 The configuration of an embodiment of a biped walking robot to which the biped walking movement device according to the present invention is applied is shown. see figure 1 , the biped walking robot 10 includes an upper body as a main body 11, the lower part of the upper body 11 has a pair of legs 13L and 13R connected thereto on both sides, and each of the legs has a The knees 12L, 12R, and have feet 14L, 14R attached to their lower ends.
[0027] Here, each leg 13L, 13R has six joints respectively, that is, from top to bottom: joints 15L and 15R, joints 16L and 16R for lumbar yaw motion (around x-axis), joints 17L and 17R for lumbar pitch motion (around y-axis), pitch for knees 12L and 12R Joint parts 18L and 18R for motion, joint parts 19L and 19R for pitching motion of the ankle relat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More