

Four freedom parallel robot mechanism with passive bound branch
A technology of passive constraints and degrees of freedom, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as unfavorable normal movement of driving devices and mechanisms, and easy generation of bending moments and shear forces
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
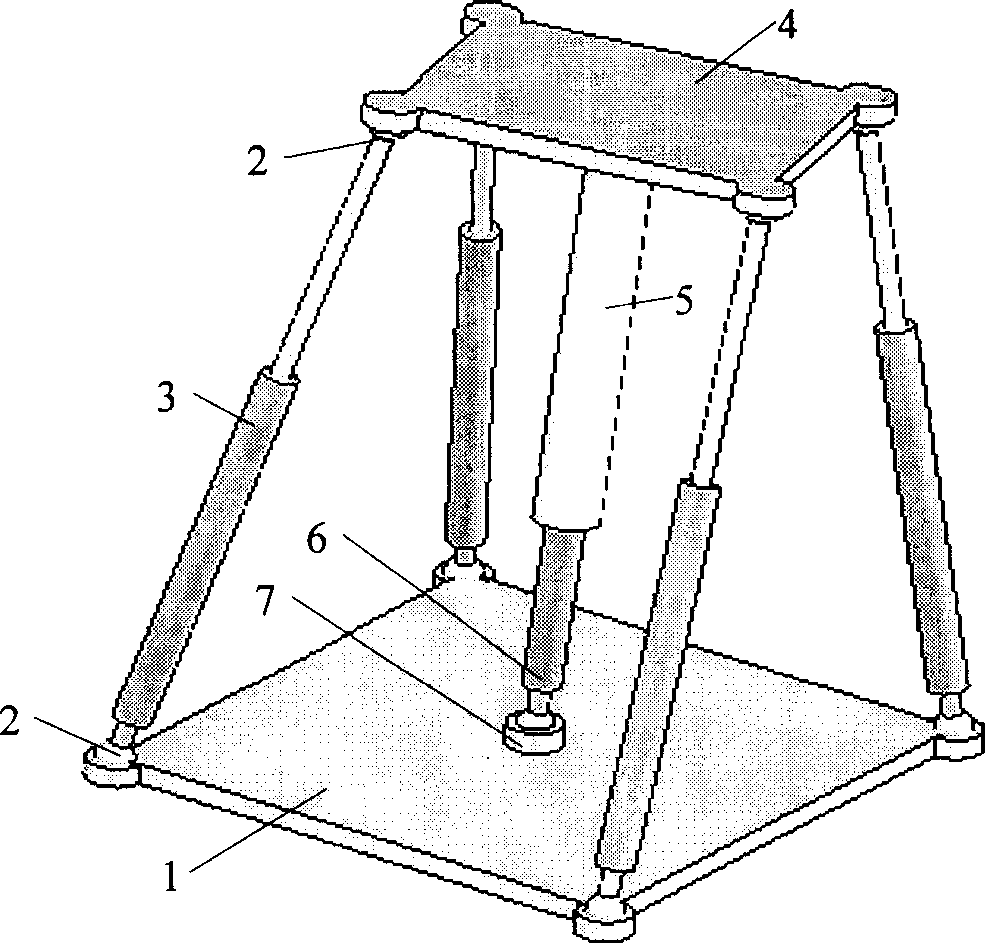
[0011] attached figure 1 It is an embodiment disclosed by the present invention. This four-degree-of-freedom parallel mechanism with passive constraint branch PS includes base 1, upper platform 4, four linear drive branches connecting base 1 and upper platform 4, and a passive constraint Composition of branches, the base 1 and the upper platform 4 are square and rectangular respectively. The kinematic chain structure of the four linear drive branches is the same, and they are distributed at the corners of the base 1 and the upper platform 4. There are ball joints 2 at both ends of the linear drive branch, and a drive movement pair 3 in the middle. The axis of the drive movement pair 3 is connected to the ball Hinge 2 centers coincide. The passive restraint branch is located in the center of the rectangle. It has a moving pair and a spherical hinge to form a PS series structure branch. The moving pair is composed of a moving pair sleeve 5 and a spherical hinge input rod 6. The...
Embodiment 2
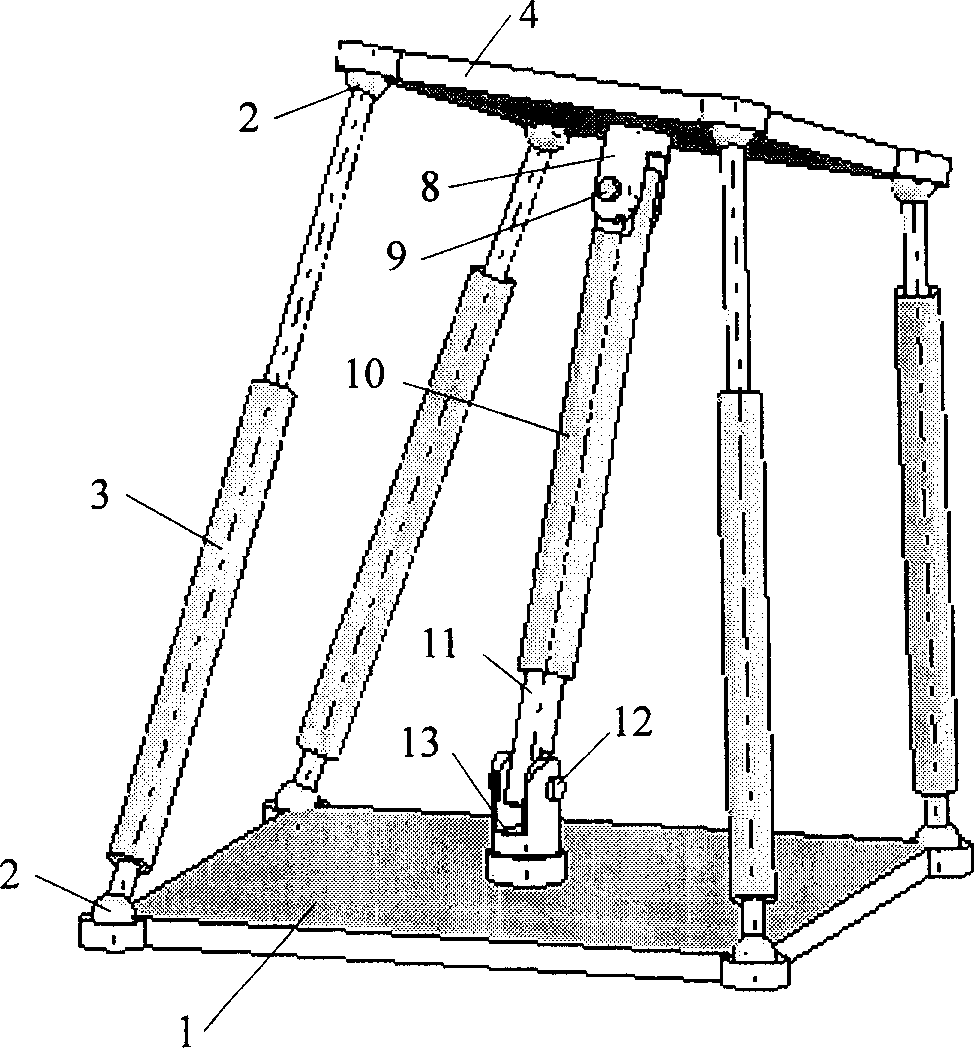
[0013] attached figure 2 It is another embodiment disclosed by the present invention. This RPT four-degree-of-freedom parallel mechanism with passive constrained branches includes a base 1, an upper platform 4, four linear drive branches connecting the base 1 and the upper platform 4, and a passive Constrained branches, the base 1 and the upper platform 4 are rectangle and square respectively. The kinematic chain structure of the four linear drive branches is the same, and they are distributed at the corners of the base 1 and the upper platform 4. There are ball joints 2 at both ends of the linear drive branch, and a drive movement pair 3 in the middle. The axis of the drive movement pair 3 is connected to the ball Hinge 2 centers coincide. The passive restraint branch is located in the center of the rectangle. It consists of a rotating pair, a moving pair and a universal hinge to form a RPT series structure branch. The input rod 8 of the rotating pair is fixedly connected t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More