

Three freedoms parallel robot mechanism with different structure drive branches
A technology of driving branches and degrees of freedom, which is applied in the direction of manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of high sensitivity to manufacturing errors, complex driving branch structures, and poor bearing capacity of kinematic pairs, so as to achieve large mechanism bearing capacity and mechanism No self micro-motion, simple mechanism effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
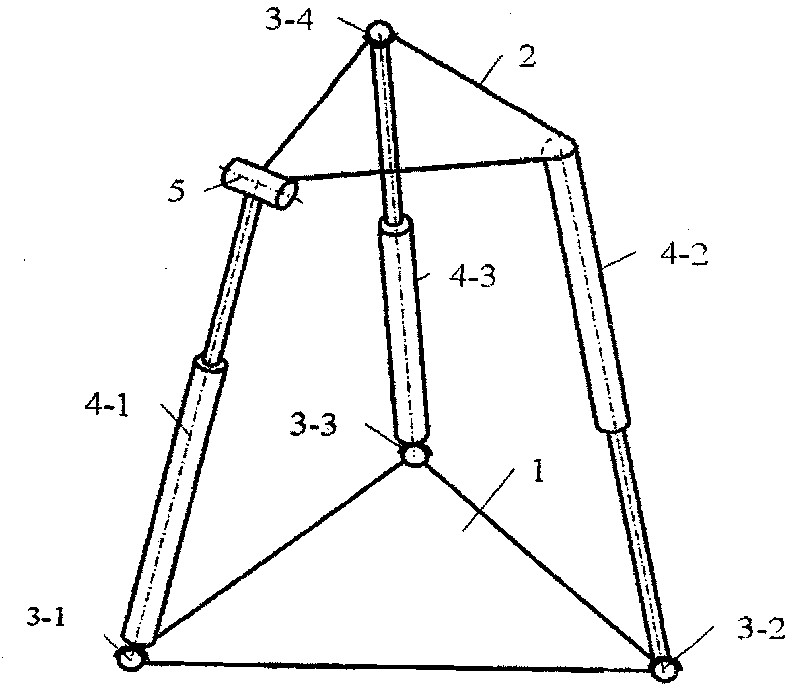
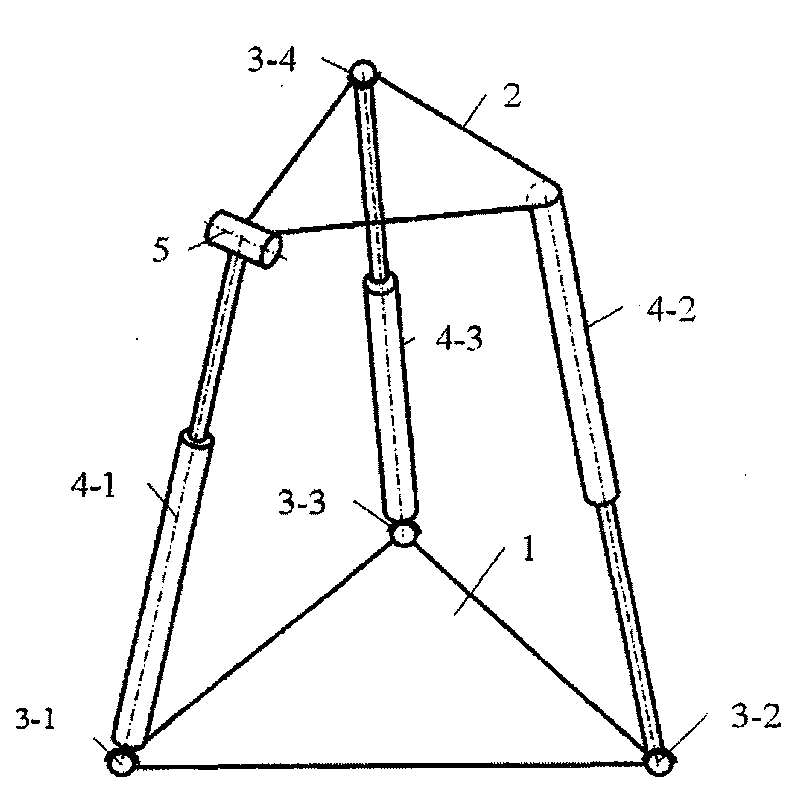
[0012] As an embodiment disclosed by the present invention, such as figure 1 As shown, this three-degree-of-freedom parallel robot mechanism with different structural drive branches includes base 1, upper platform 2 and three linear drive branches with different structures connecting base 1 and upper platform 2, base 1 and platform 2 are equilateral triangles; the structures of the three linear drive branch kinematic chains are different, and they are distributed at the triangular vertices of base 1 and platform 2; the kinematic chain structures of the three linear drive branches are SPR, SP and SPS respectively. The SPR branch includes a spherical joint 3 - 1 , a linearly driven moving pair 4 - 1 and a rotating pair 5 . The rotating pair 5 connects the upper end of the linear drive moving pair 4-1 rod with the upper platform 2, and the ball joint 3-1 connects the lower end of the linear driving moving pair 4-1 cover with the base 1. The SP branch includes a ball joint 3-2 an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More