

Robot machanism able to achieve two-D movement and of two-freedom plane-parallel type
A two-dimensional translation and degree of freedom technology, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of rod error accumulation, poor dynamic performance, and low end precision, so as to achieve no accumulation of position errors and high speed Two-dimensional movement, the effect of improving the overall stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to better understand the present invention, the present invention will be further described below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited thereto.
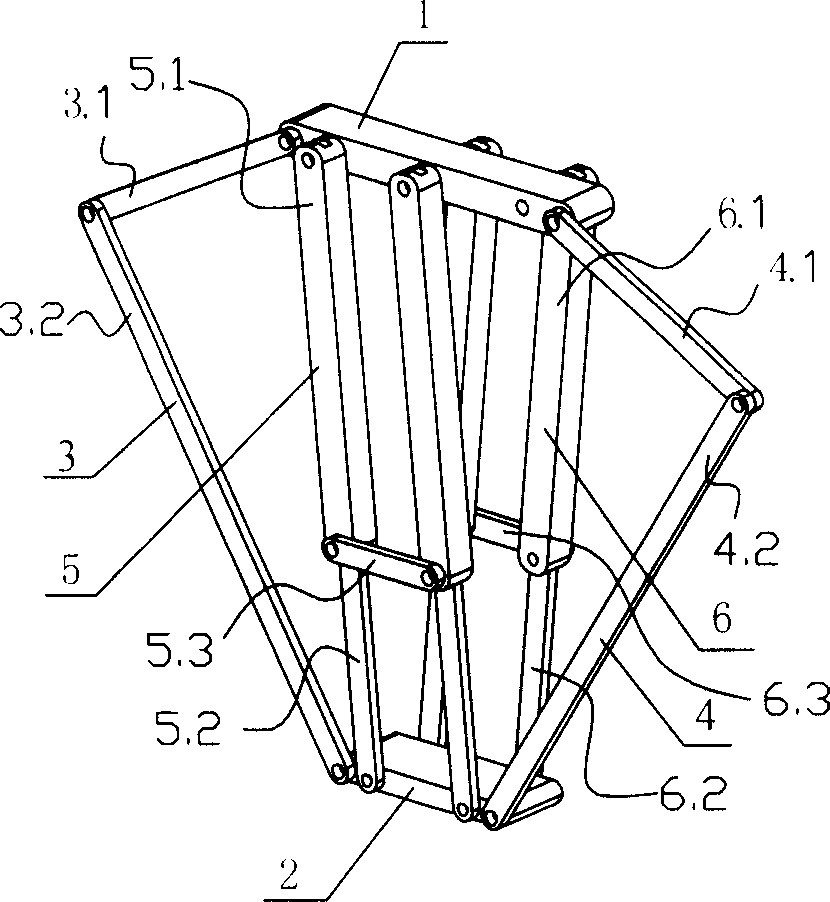
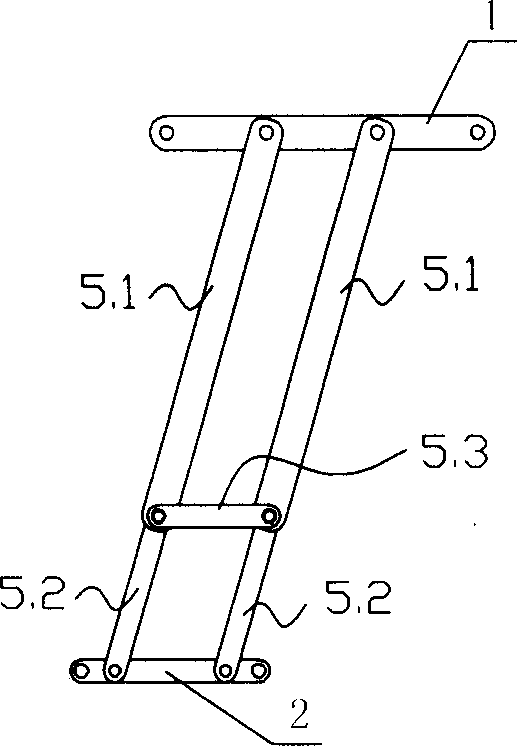
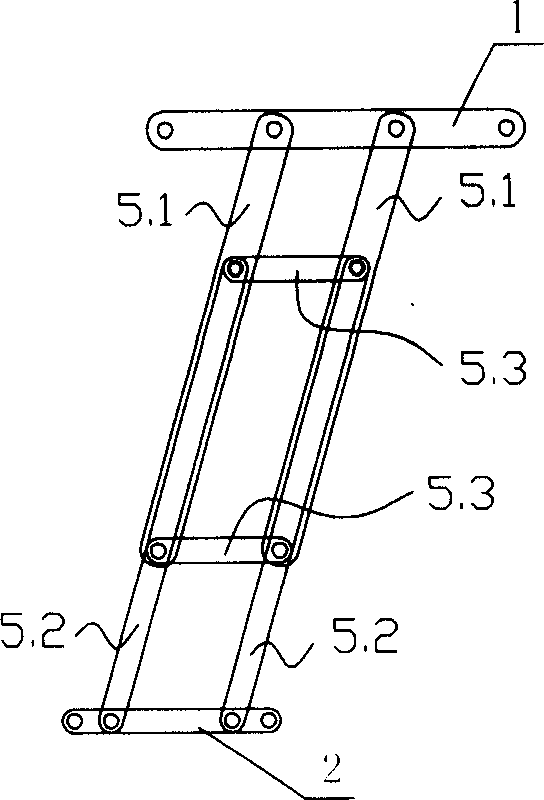
[0024] Such as figure 1 As shown, the two-dimensional translational two-degree-of-freedom plane parallel robot mechanism of the present invention includes a static platform 1, a dynamic platform 2 and a branch chain connecting the static platform 1 and the dynamic platform 2, and the dynamic platform 2 is connected to the static platform through four branch chains. Platform 1 is connected, two of which are active branch chains 3 and 4, and the other two are passive branch chains 5 and 6; active branch chain 3 (4) includes a master arm 3.1 (4.1) and a slave arm 3.2 (4.2) , one end of the active arm 3.1 (4.1) is connected to the static platform 1 through the rotating pair, the other end is connected to the driven arm 3.2 (4.2) through the rotatin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More