

Novel four-degree-of-freedom articulated robot structure
A technology of plane joints and degrees of freedom, applied in manipulators, program-controlled manipulators, joints, etc., can solve the problems of complex structure and high manufacturing cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further elaborated below in conjunction with the accompanying drawings and embodiments.
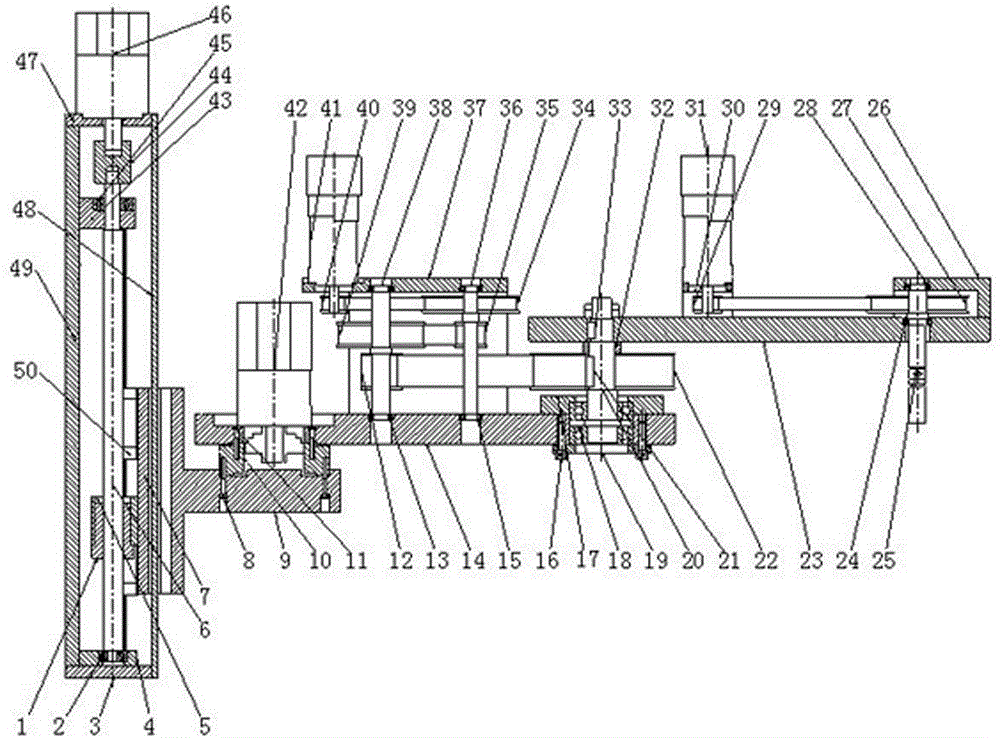
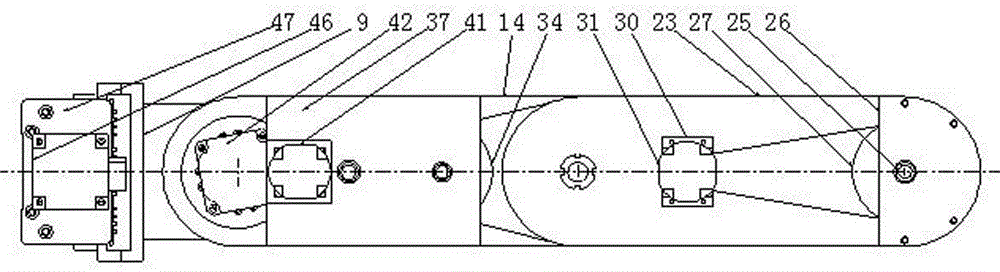
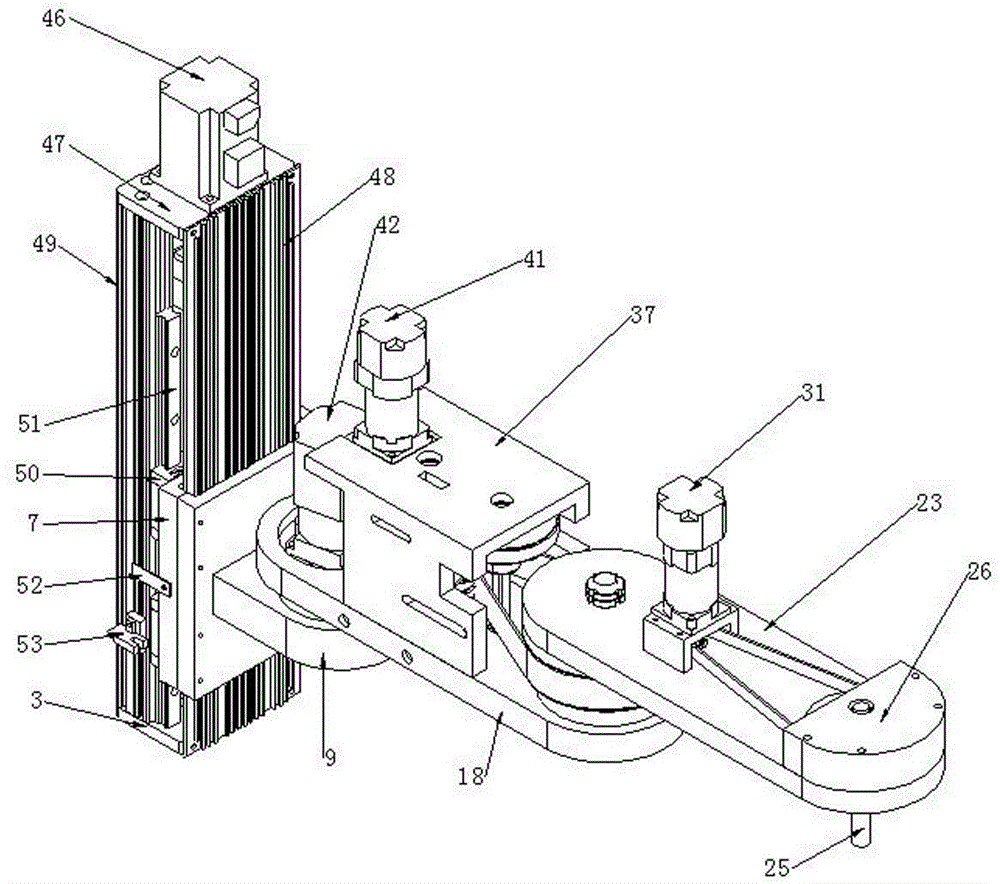
[0034] Such as Figure 1 to Figure 4 As shown, a new four-degree-of-freedom planar joint robot structure includes: a base 3 for supporting and damping; under the limit action of the screw 6, the screw nut 1 and the guide rail pair, it goes up and down along the Z-axis direction The moving lifting base 9; the first mechanical arm 14, which is rotatably mounted on the lifting base 9 with the X axis parallel to the Z axis as the rotation center; the Y-axis cover 37 is installed on the first mechanical arm 14 , support the first shaft 38 of the Y-axis reduction device and the second shaft 36 of the Y-axis reduction device, and have a through hole for the Y-axis servo motor shaft, the first shaft 38 of the Y-axis reduction device and the second shaft 36 of the Y-axis reduction device; the second mechanical Arm 23, which is rotatably mounted on the first me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More