

Biped toy that can walk on two feet
a toy and walker technology, applied in the field of toy walker, can solve the problem that the toy cannot walk as smoothly as the robot does
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The particulars shown herein are by way of example and for purposes of illustrative discussion of an embodiment of the present invention. The description taken with the drawings makes it apparent to those skilled in the art how the present invention may be embodied in practice.
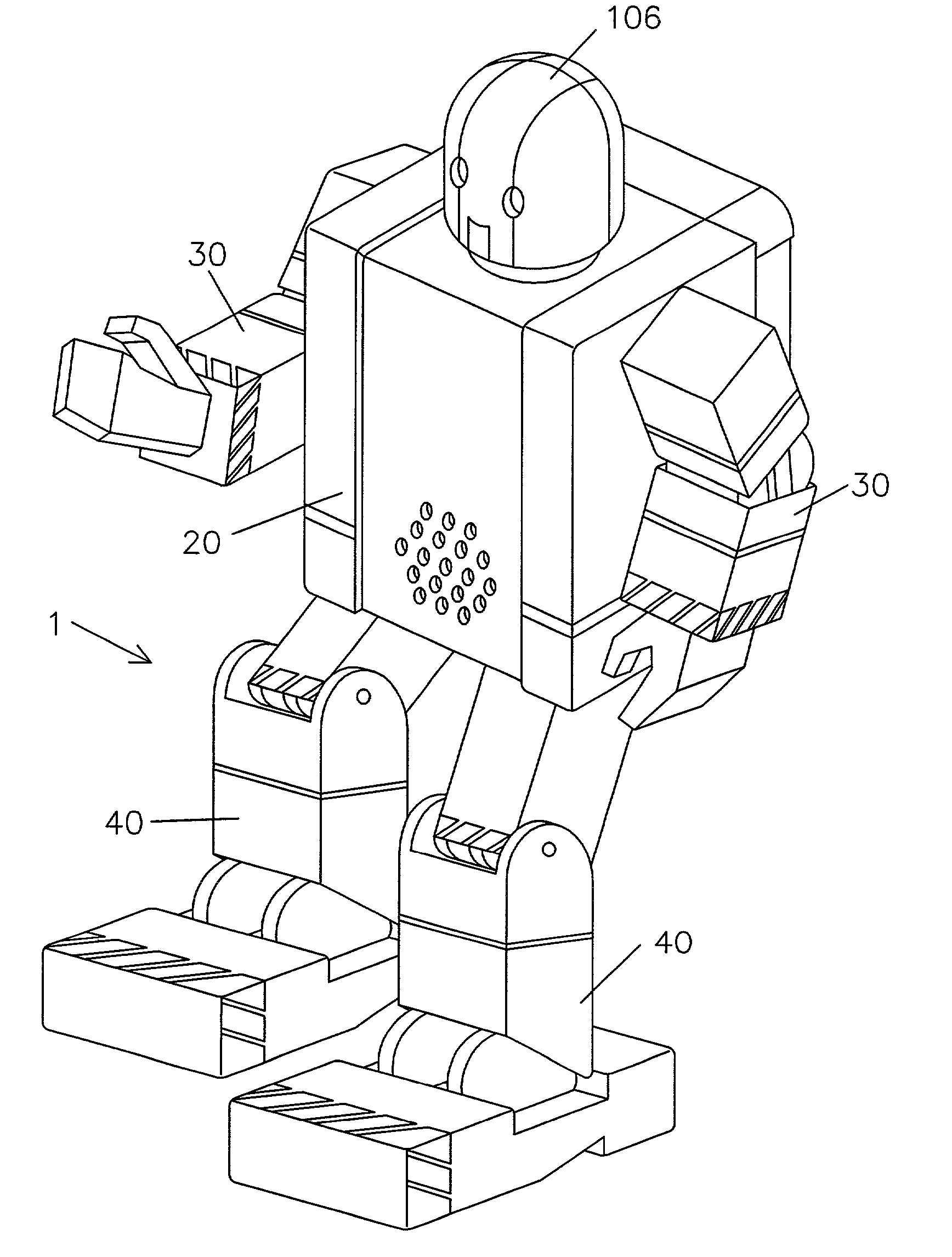
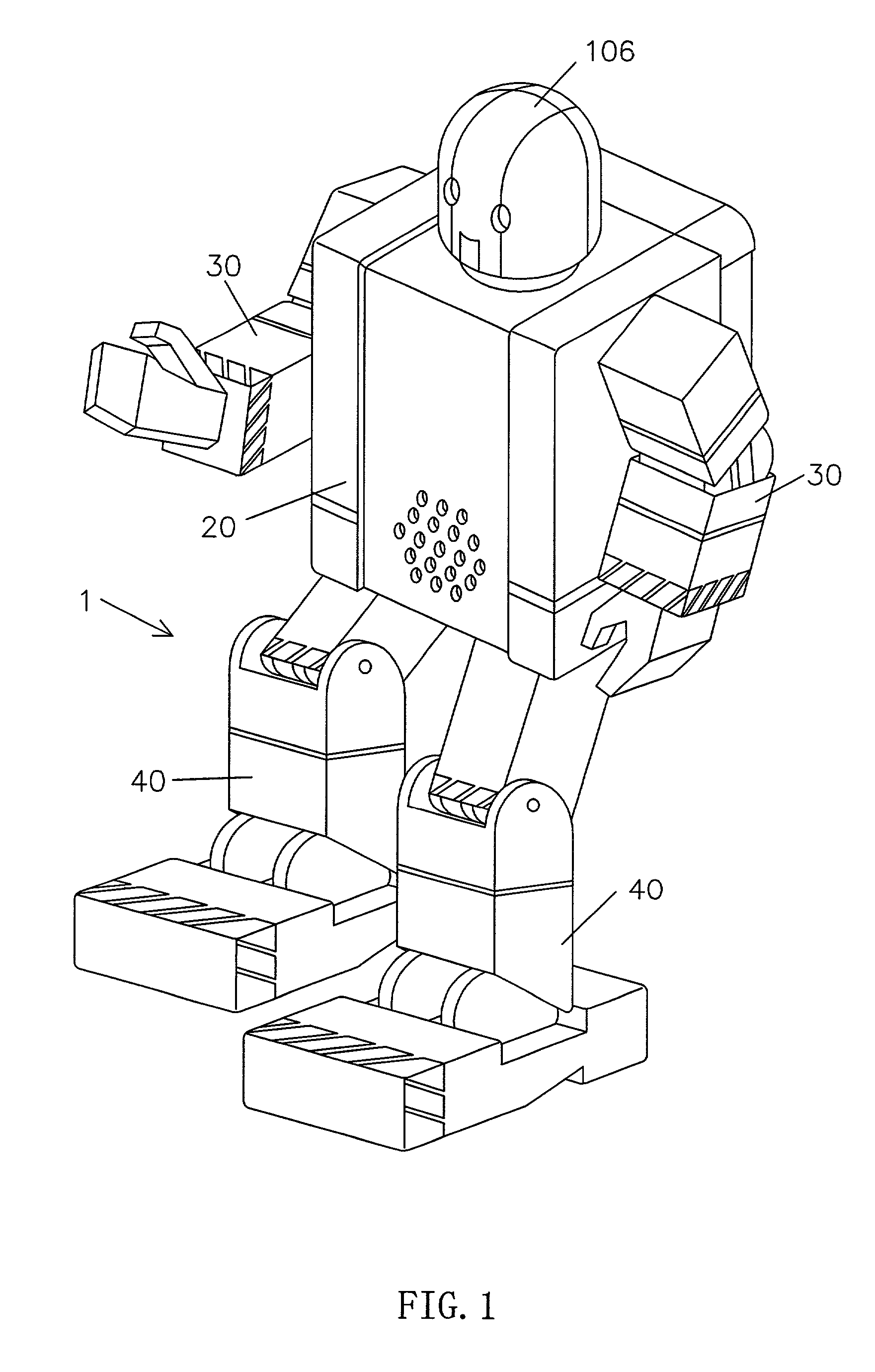
[0052] FIG. 1 is a perspective view showing an external appearance of a biped toy that can walk on two feet according to the present invention. A toy main body 1 is made to mimic a robot and is constructed by assembling together a head portion 10, a torso 20, two arm portions 30 and two legs 40. A waking action according to the invention is realized by shifting the torso so that the weight of the torso is shifted and shifting the center of gravity of the toy betwee the two legs 40, and actions of the head portion 10 and the two arm portions 30 are not associated with the walking action but in order to realize natural walking actions the head portion and the two arm portions are made to move in associati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More