

Devices and methods for presenting and regulating auxiliary information on an image display of a telesurgical system to assist an operator in performing a surgical procedure
a technology of telesurgical system and image display, which is applied in the direction of diagnostic recording/measuring, application, catheter, etc., can solve the problems of expanding the use of minimally invasive techniques, reducing the number of surgeries currently using minimally invasive techniques, and reducing the number of surgeries
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
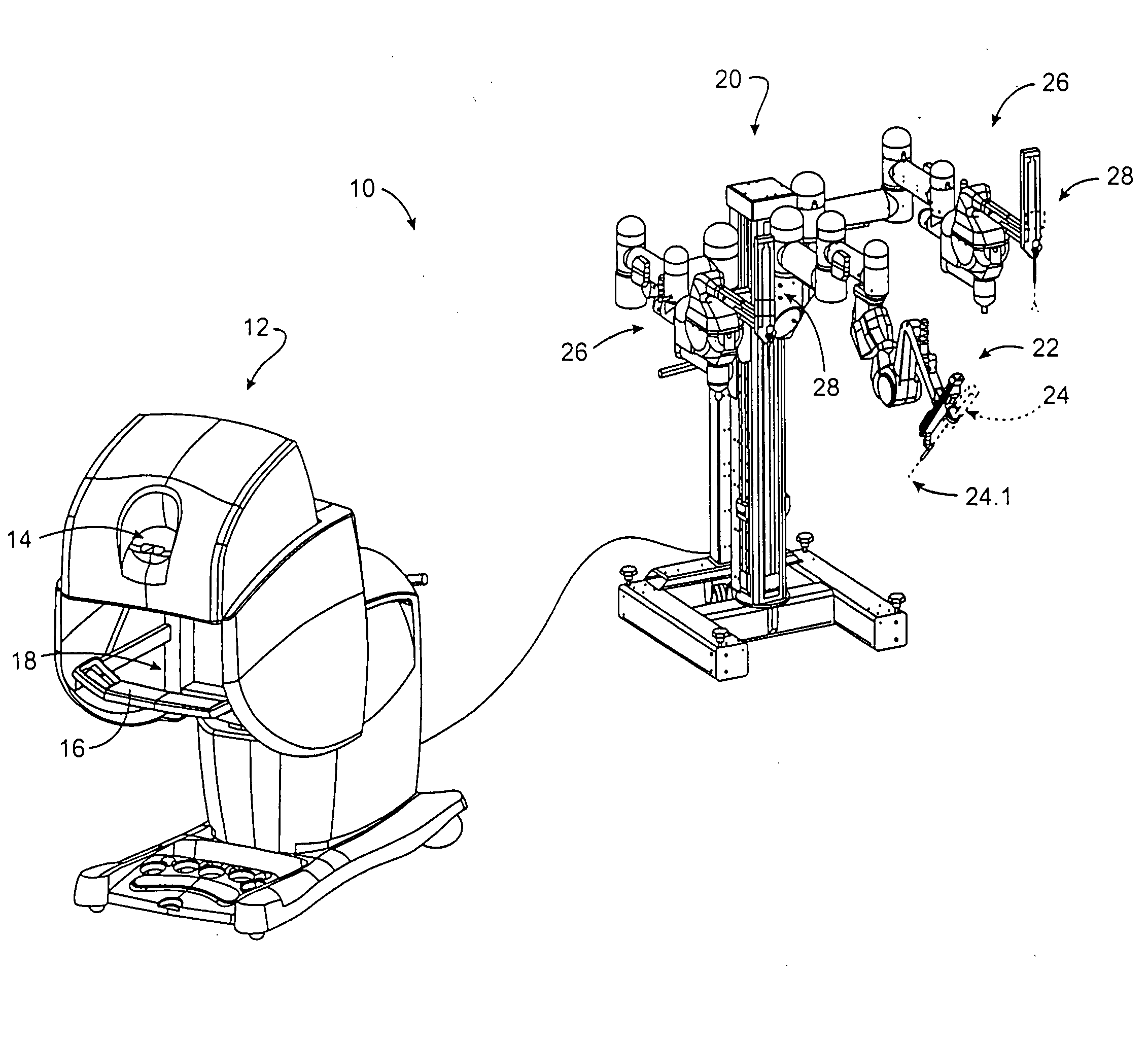
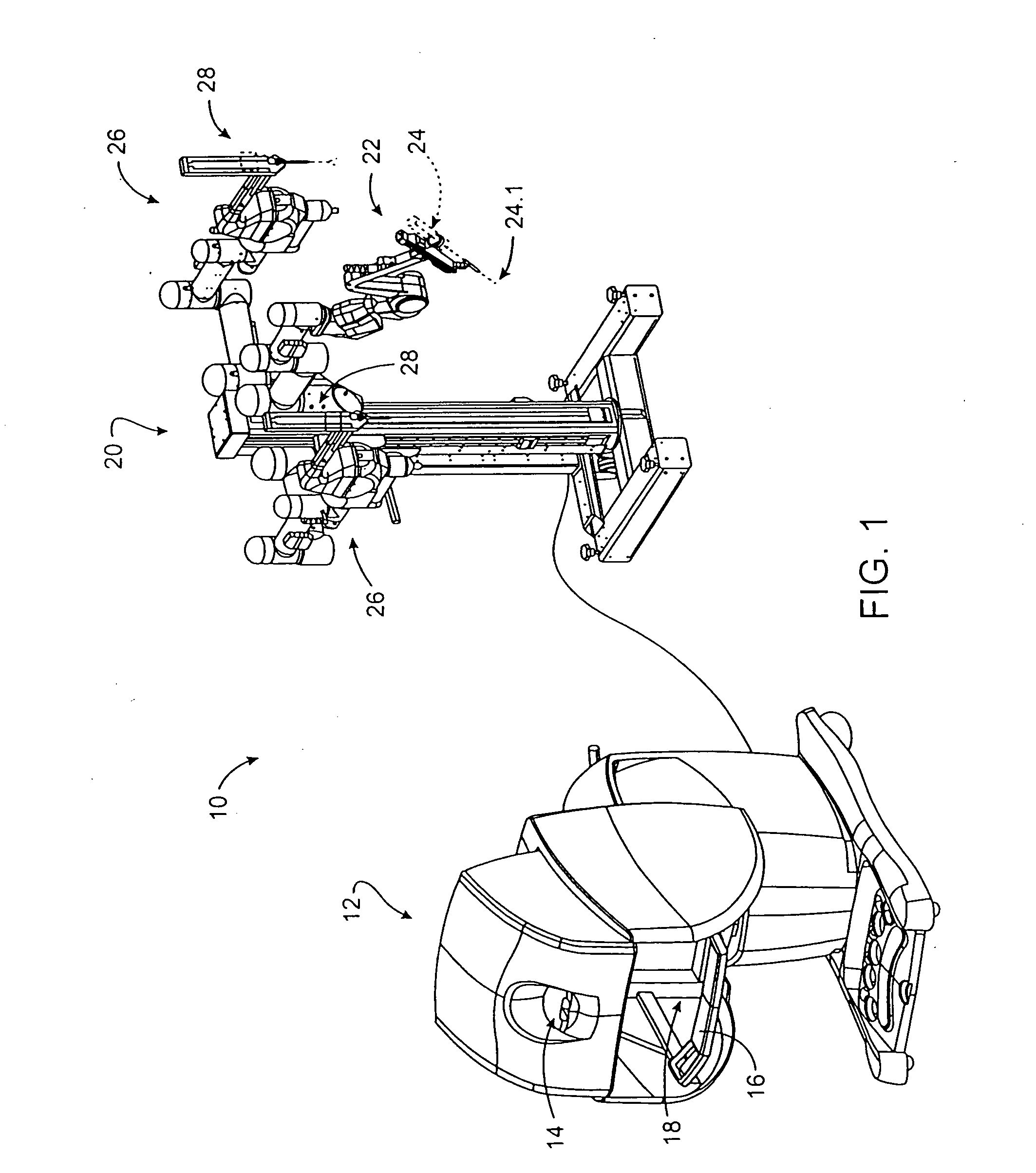
[0035] Referring to FIG. 1 of the drawings, a minimally invasive telesurgical system, or robotically controlled surgical system, in accordance with the invention is generally indicated by reference numeral 10. The system 10 includes a control station, or surgeon's console, generally indicated by reference numeral 12. The station 12 includes an image display or viewer 14 where an image of a surgical site is displayed in use. A support 16 is provided on which an operator, typically a surgeon, can rest his or her forearms while gripping two master control devices, one of which is shown in FIG. 6 of the drawings, one in each hand. The master controls are positioned in a space 18 inwardly beyond the support 16. When using the control station 12, the surgeon typically sits in a chair in front of the control station 12, positions his or her eyes in front of the viewer 14 and grips the master controls one in each hand while resting his or her forearms on the support 16.
[0036] The system 10...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More