

Robotic manipulator
a robot and manipulator technology, applied in the direction of mechanical control devices, instruments, process and machine control, etc., can solve the problems of limited range, limited vertical support of manipulable loads, and difficult assembly procedures, and the effect of requiring complex components
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
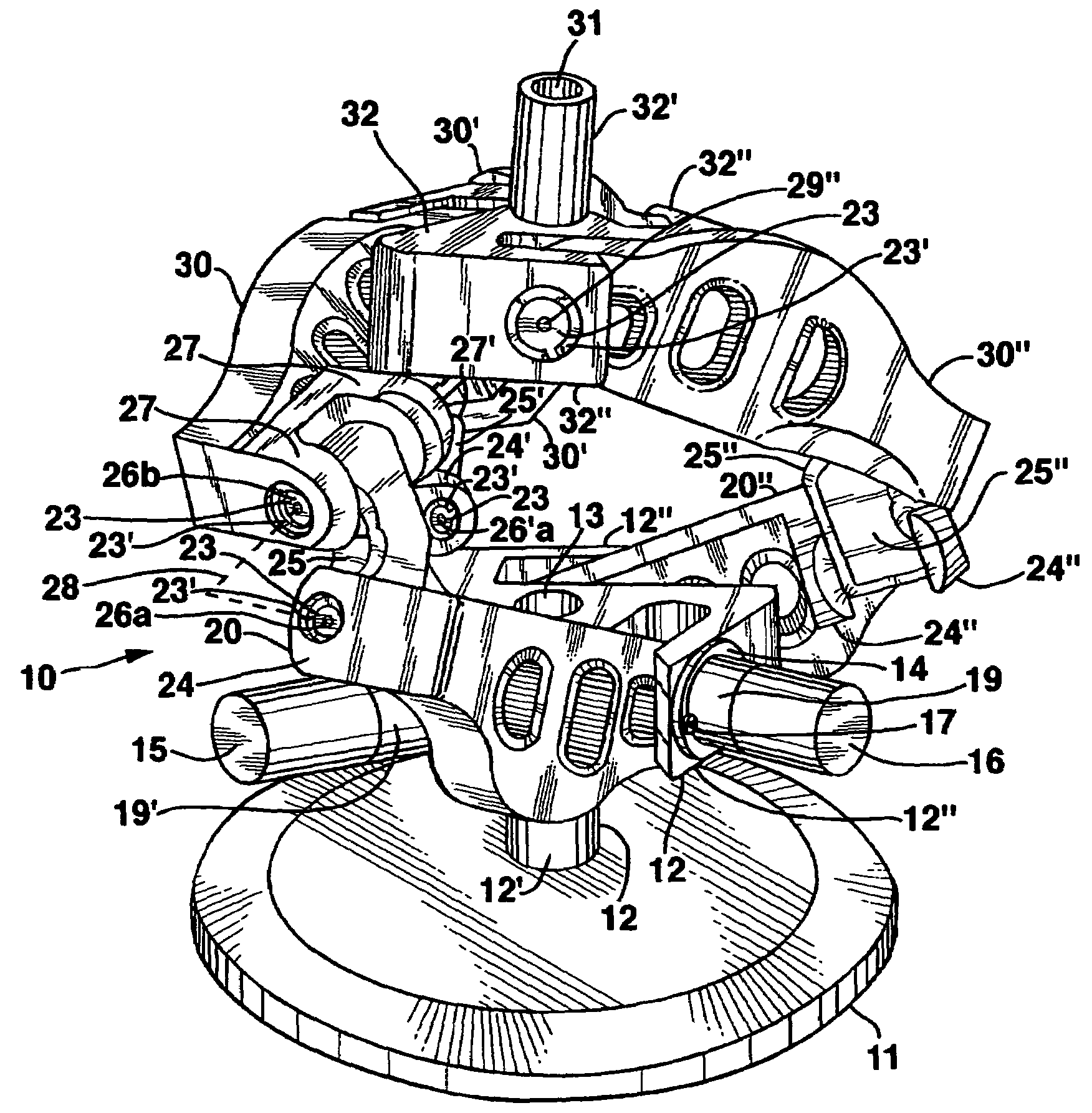
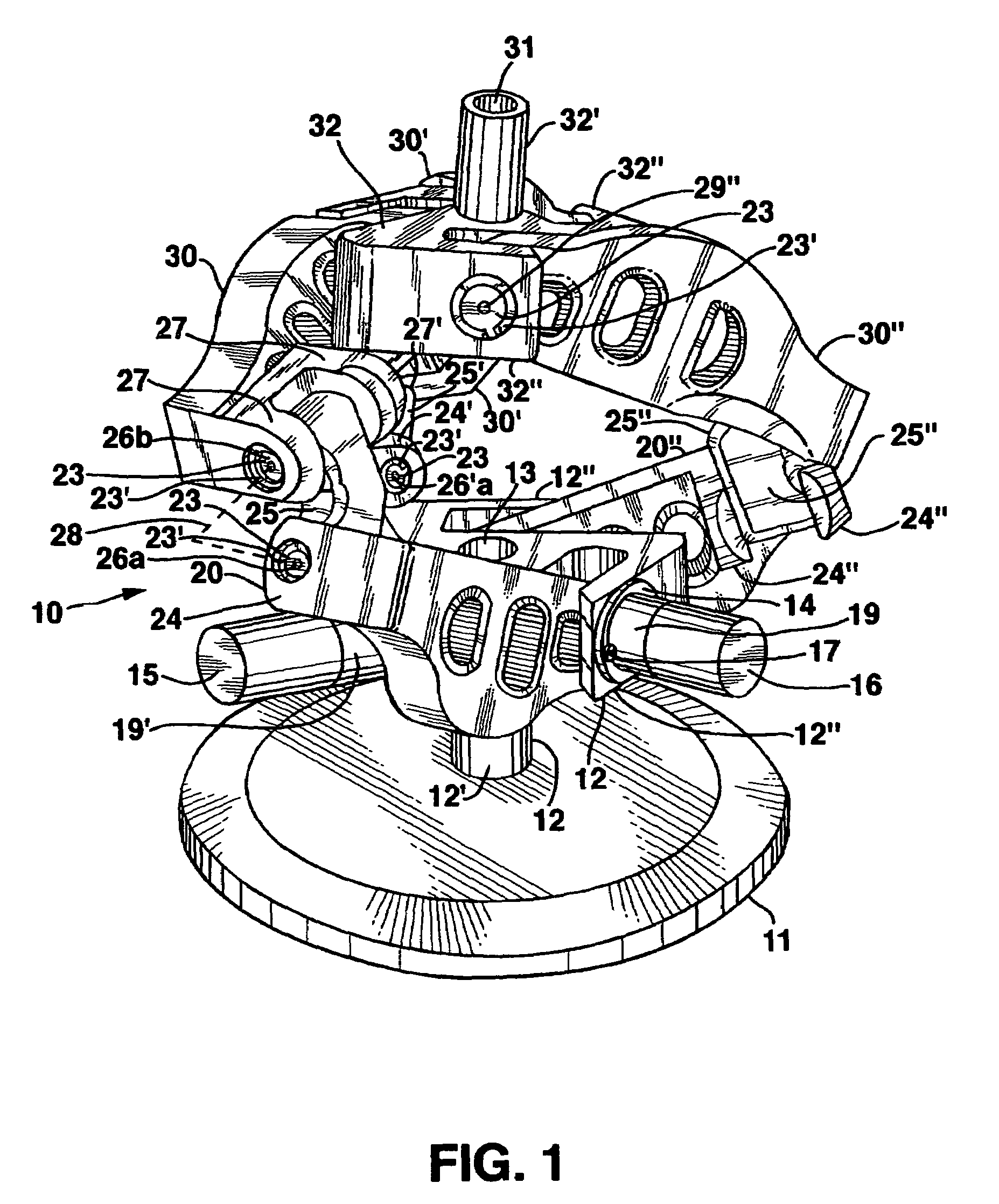
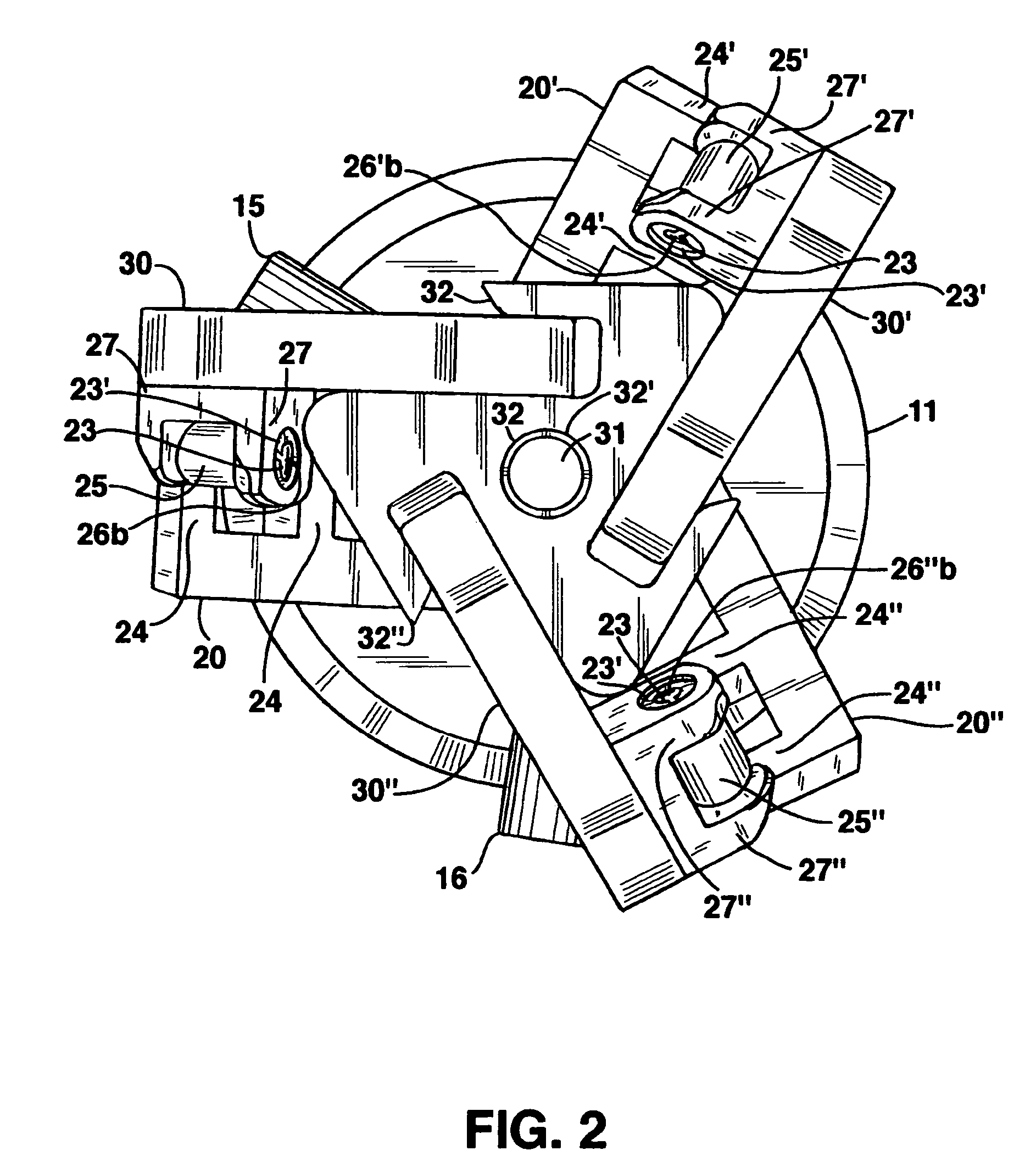
[0017]FIGS. 1 and 2 show a first embodiment of a mechanical manipulator, or controlled member motion system, 10, which can have a very large output operating range in various configurations over which it is free of singularities, and which is operated by various force imparting devices directly or through various kinds of drive trains. FIG. 1 shows an elevation view of manipulator 10 with FIG. 2 showing a top view thereof. Manipulator 10 is positioned on a mounting arrangement, 11, which can contain therein an electric motor arrangement, unseen in these figures, which can rotate mounting arrangement 11 in either the clockwise or counterclockwise direction as selected by the user to thereby carry the remainder of joint or manipulator 10 correspondingly with it in these directions.
[0018]Directly supported on mounting arrangement 11 is a base support, 12, shown as truncated cylindrical shell structure, 12′, affixed at one end thereof on mounting arrangement 11 and fixedly supporting on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More