

System and method for determining an optimal surgical trajectory
a surgical trajectory and optimal technology, applied in the field of optimal surgical trajectory determination system and method, can solve the problems of complexity of surgical procedure, complexity of endoscopic procedure, and difficulty in determining optimal surgical trajectory
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
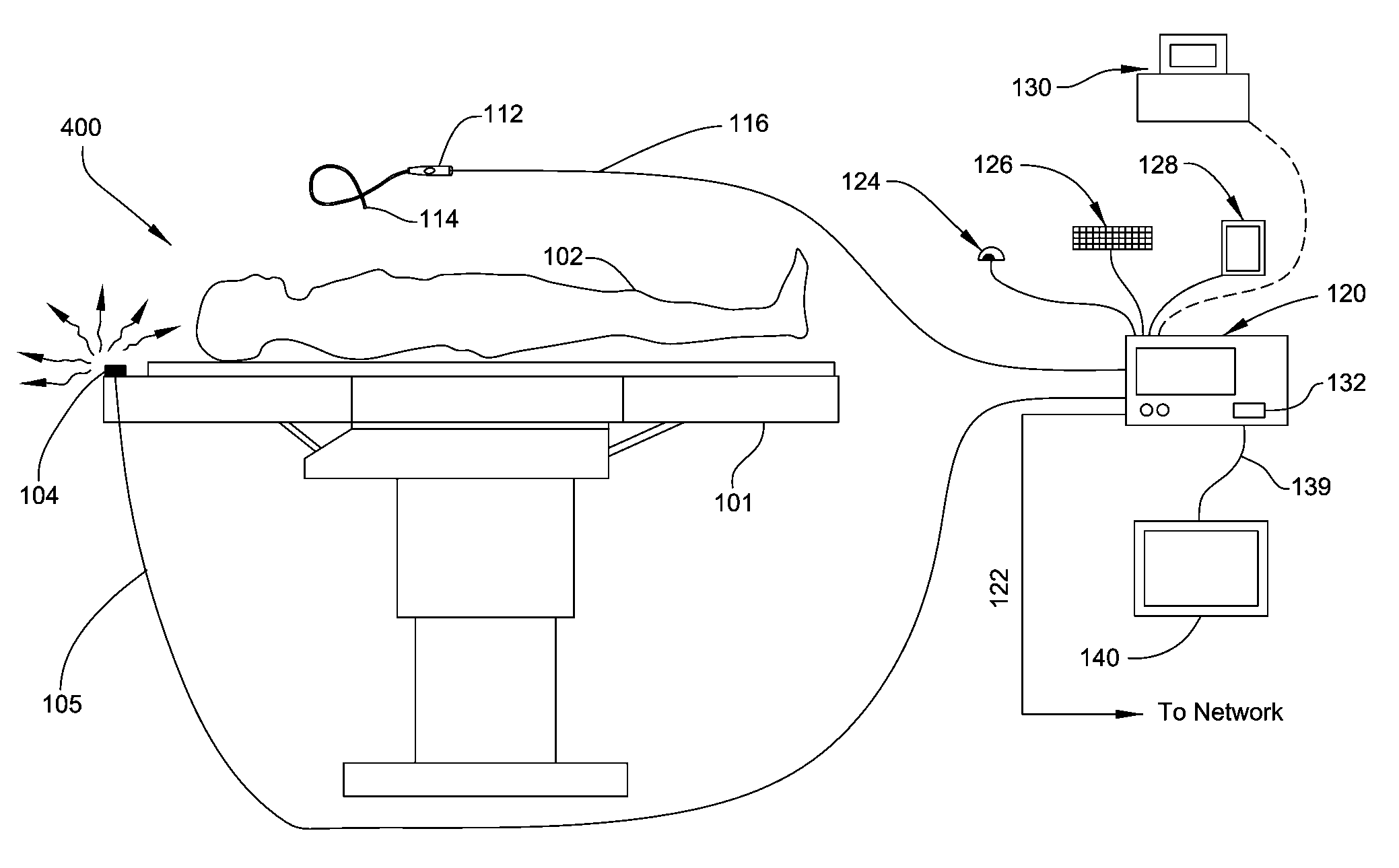
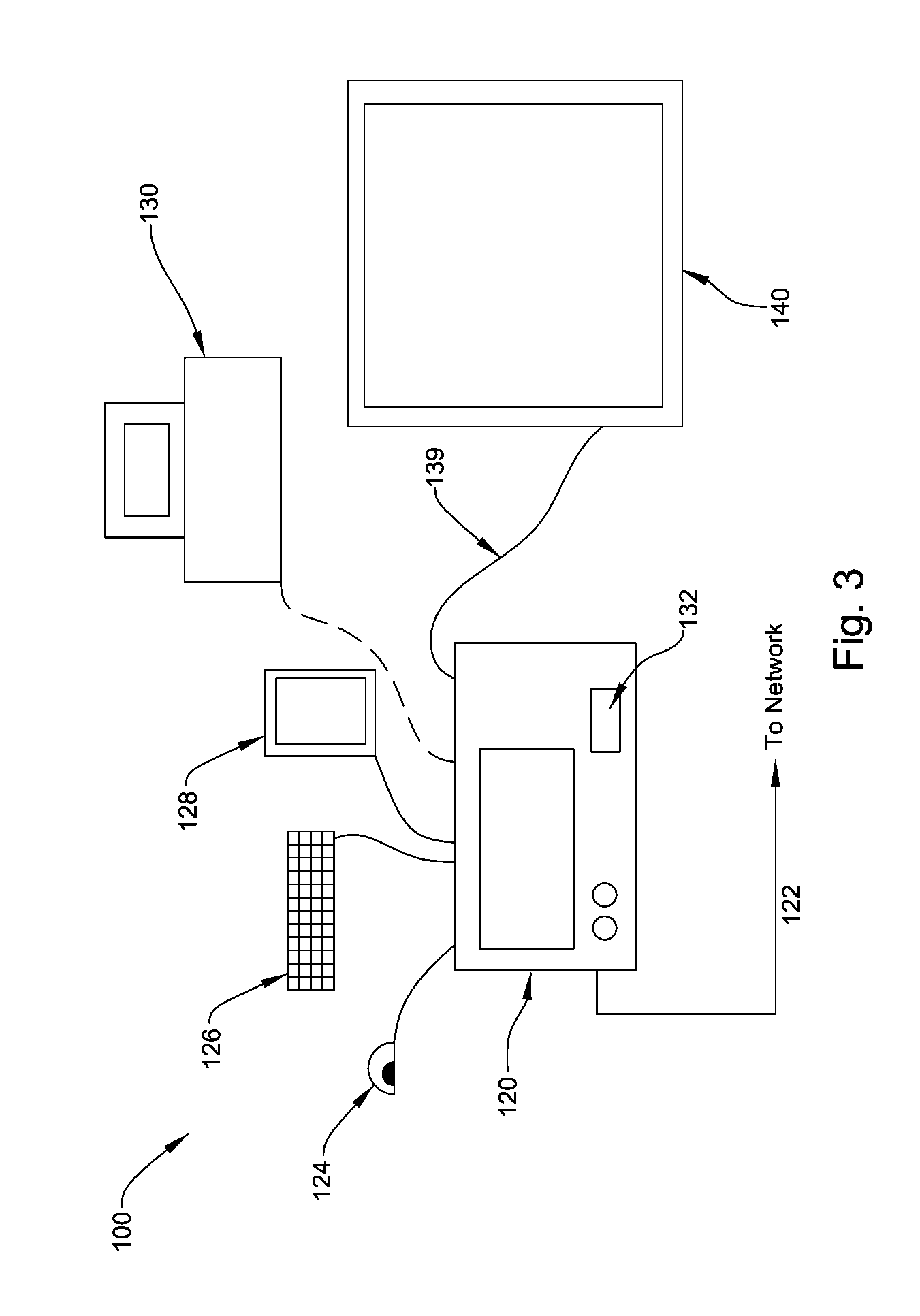
[0030]FIG. 3 depicts a system 100 for calculating in real time an optimal surgical trajectory or path for displacing a surgical instrument through the interior of the patient body. If a first determined optimal surgical trajectory is either deviated from or rejected, the system is able to determine and present a new optimal trajectory in essentially real time.
[0031]According to the present embodiment, the surgical trajectory determination system 100 includes a central controller 120 configured to receive various information, calculate an optimal surgical trajectory, and present a calculated trajectory to a user. Received information can relate to various factors, including, for example, surgical preferences, instrument parameters, and patient data.
[0032]Connecting to central controller 120 can be one or more human interface devices, such as, for example, a mouse 124, keyboard 126 and graphics tablet 128, which can be utilized by the surgeon or other users to input patient and surgic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More