

Non-coupling two-dimension moving one-dimension turning three-freedom spatial parallel mechanism
A technology with a degree of freedom and no coupling, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as complex structures, and achieve broad application prospects and high practical value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
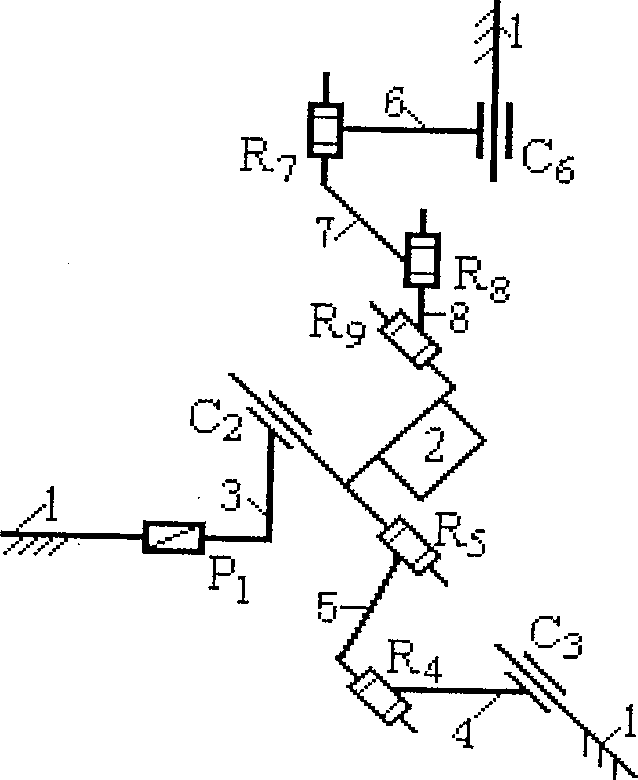
[0021] A non-coupling two-movement-rotation three-degree-of-freedom space parallel mechanism is composed of a static platform 1, a dynamic platform 2, and three branches respectively connected between the static platform 1 and the dynamic platform 2. Its specific structure is as follows figure 1 Shown: the first branch is from the static platform 1 to the moving platform 2 by the first moving pair P 1 and one with the first mobile vice P 1 Vertical second cylindrical pair C 2 It is formed in series, and the two kinematic pairs are connected by the third member 3; the second branch is from the static platform 1 to the moving platform 2 by the third cylindrical pair C 3 and with the third cylindrical pair C 3 Axis-parallel fourth rotating pair R 4 and the fifth rotating pair R 5 sequence in series, the third cylindrical pair C 3 with the fourth rotating pair R 4 between, the fourth revolving pair R 4 with the fifth rotating pair R 5 They are respectively connected by the...
Embodiment 2
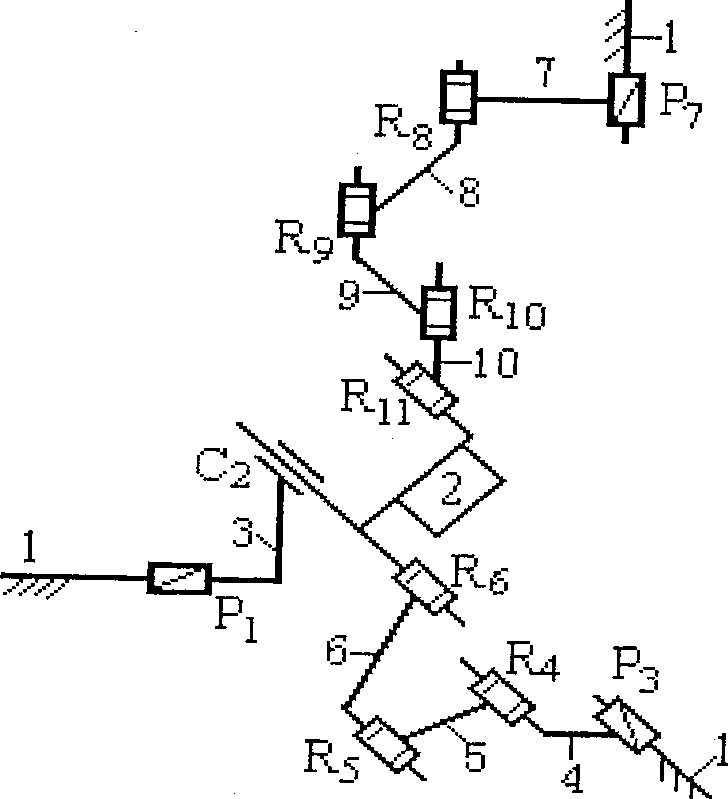
[0024] An uncoupled two-movement-rotation three-degree-of-freedom space parallel mechanism consists of a static platform 1, a moving platform 2 and three branches. The specific structure is as follows: figure 2 As shown, among them, the first branch is from the static platform 1 to the moving platform 2 by the first moving pair P 1 and one with the first mobile vice P 1 Vertical second cylindrical pair C 2 It is formed in series, and the two moving pairs are connected by a component 3; the second branch is from the static platform 1 to the moving platform 2 by the third moving pair P 3 And the axis and the third moving pair P 3 Parallel fourth rotating pair R 4 , the fifth revolving pair R 5 and the sixth rotating pair R 6 sequence in series, the third mobile pair P 3 with the fourth rotating pair R 4 between, the fourth revolving pair R 4 with the fifth rotating pair R 5 between, the fifth revolving pair R 5 with the sixth rotating pair R 6 They are respectively c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More