

(2T1R)&(2R) Double-acting platform decoupling parallel serial robot mechanism
A dual-action platform and robot technology, applied in the field of robotics, can solve the problems of motion coupling and difficult motion control, and achieve the effects of broad application prospects, easy controllability and high practical value.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
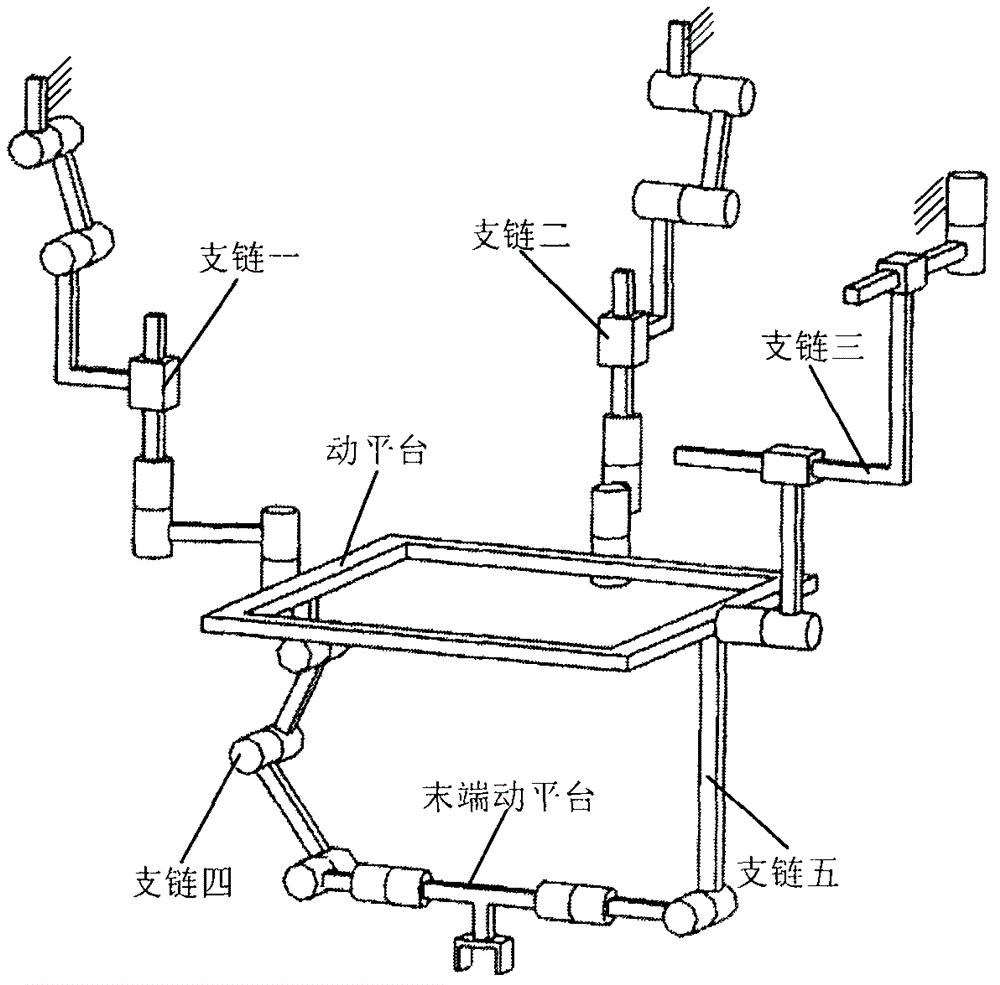
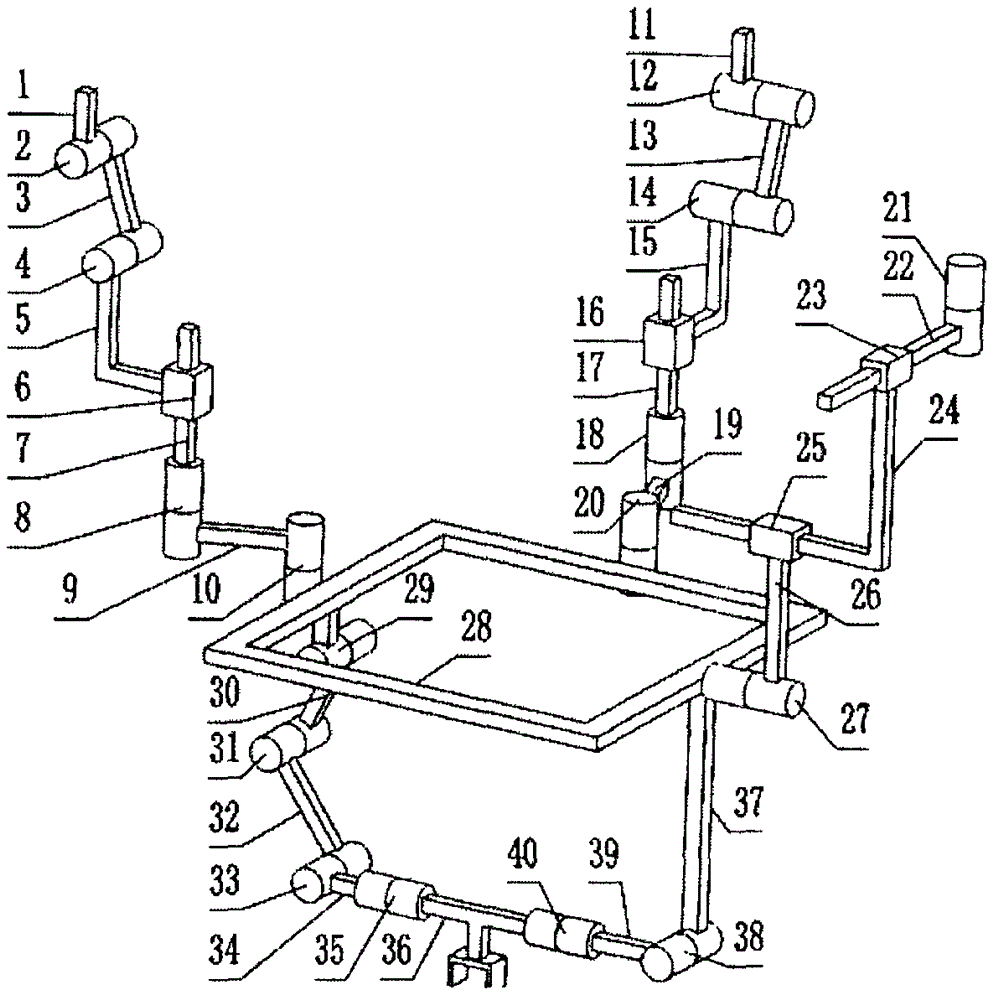
[0017] A (2T1R)&(2R) fully decoupled hybrid robot mechanism, such as figure 1 , 2 As shown, the mechanism consists of a (2T1R) parallel mechanism connected in series with a (2R) parallel mechanism. The (2T1R) parallel mechanism consists of a fixed platform, a moving platform 28 and three branch chains connecting the two platforms. In the branch chain one, one end of the connecting rod 3 is connected with the connecting rod 1 on the fixed platform through the rotating pair 2, the other end of the connecting rod 3 is connected with the second connecting rod 5 through the rotating pair 4, and the other end of the connecting rod 5 is moved by The pair 6 is connected with the third connecting rod 7, the connecting rod 7 is connected with the fourth connecting rod 9 through the rotating pair 8, and the other end of the connecting rod 9 is connected with the moving platform 28 through the rotating pair 10, wherein the first connecting rod 3 has two The axes of the rotating pairs 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More