

Two-movement-three-rotation complete decoupling and series-parallel linking robot mechanism
A completely decoupled and robotic technology, applied in the field of two-moving, three-rotating, five-degree-of-freedom fully decoupled hybrid robot mechanism, can solve problems such as motion coupling and difficult motion control, and achieve simple and stable structure, good controllability, and good rigidity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
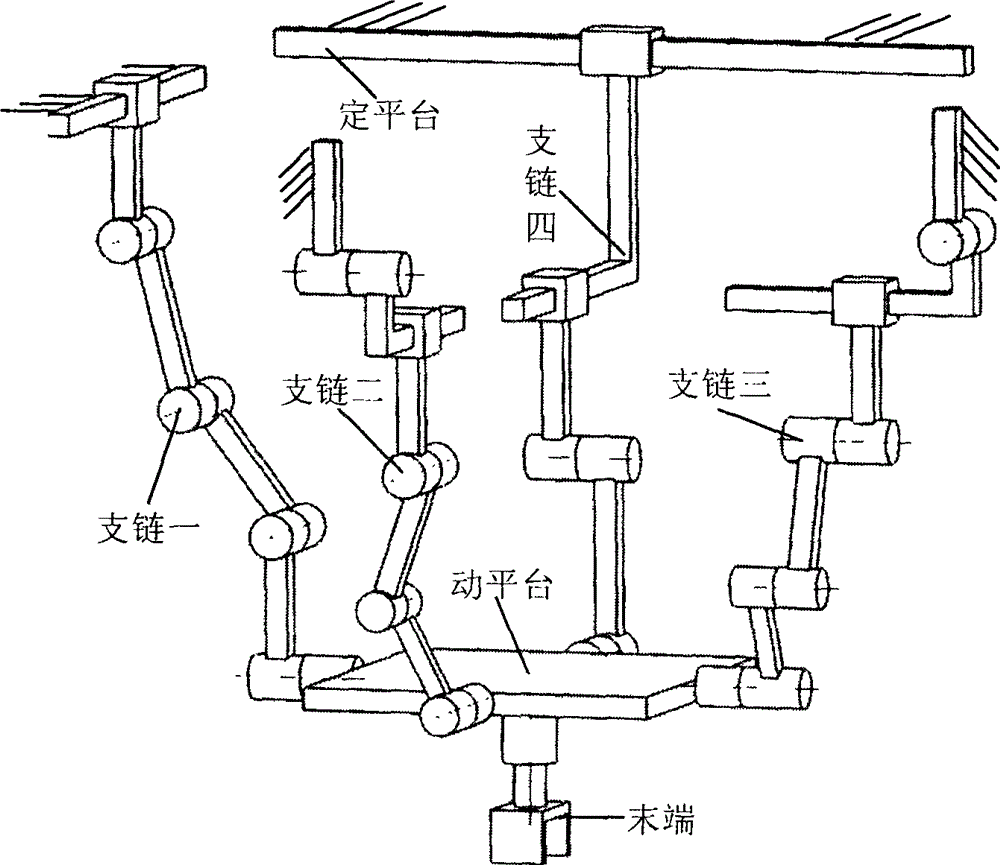
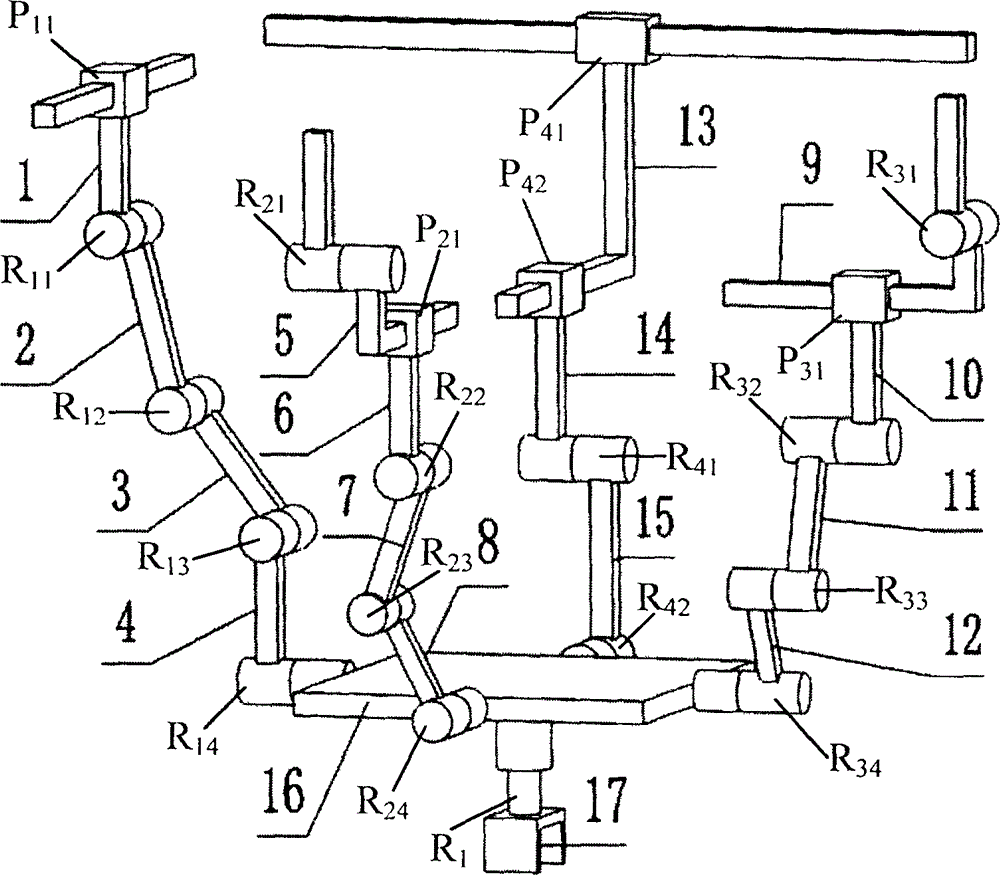
[0016] A fully decoupled hybrid robot mechanism with two movements and three rotations, such as figure 1 , 2 As shown, the mechanism consists of a 2T2R parallel mechanism connected in series with a revolving pair R 1 composition. The parallel mechanism consists of a fixed platform, a moving platform 16 and four branch chains connecting the two platforms.
[0017] In branch chain 1, one end of the first connecting rod 1 is connected to the chute of the fixed platform through the moving pair P11, and the other end of the connecting rod 1 is connected through the rotating pair R 11 It is connected with the second connecting rod 2, and the other end of the connecting rod 2 passes through the rotating pair R 12 It is connected with the third connecting rod 3, and the connecting rod 3 passes through the rotating pair R 13 It is connected with the fourth connecting rod 4, and the other end of the connecting rod 4 is connected with the moving platform 16 through the rotating pair ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More