

Fully-isotropic two-dimensional movement and rotation parallel robot mechanism
A completely isotropic, robotic technology, applied in the field of completely isotropic two-shift and two-rotation parallel robot mechanisms, can solve problems such as poor structural rigidity and complex branch chains, and achieve easy processing, manufacturing and assembly, broad application prospects, and good Effects on Structural Stability and Dynamic Performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
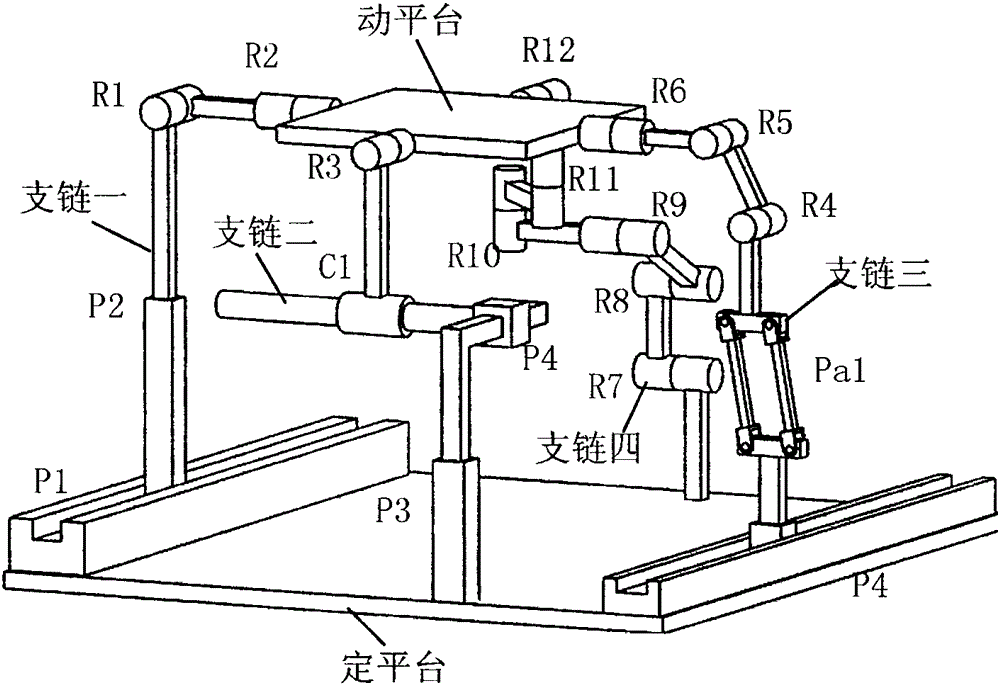
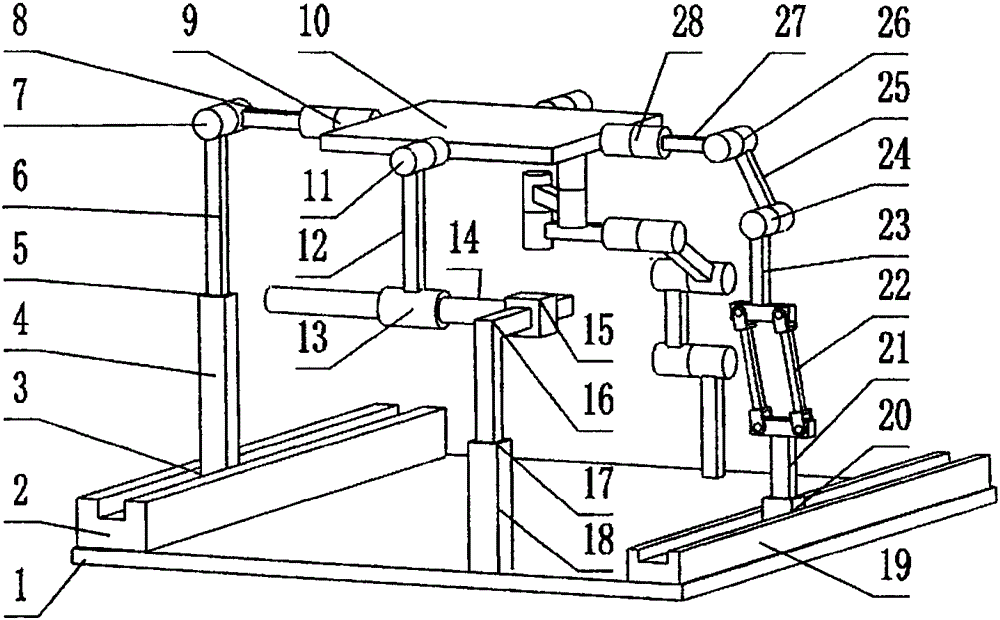
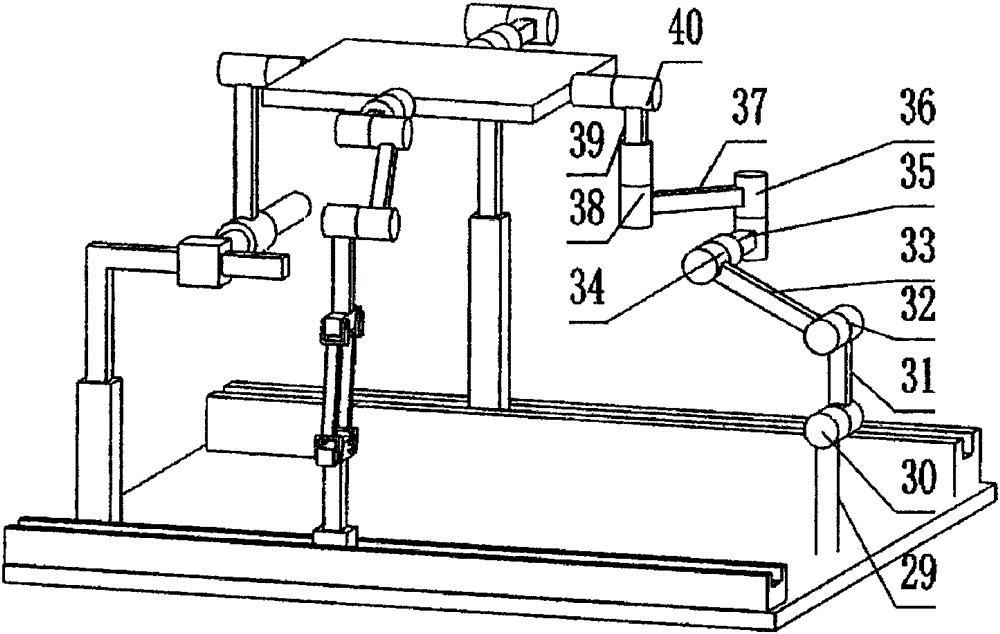
[0019] A two-shift, two-rotation four-degree-of-freedom completely isotropic space parallel mechanism, such as figure 1 , 2 , Shown in 3, mechanism is made up of fixed platform 1, moving platform 10 and four branch chains connecting between two platforms. In the branch chain one, one end of the first connecting rod 4 is connected with the fixed platform chute 2 through the moving pair 3 parallel to the fixed platform, and the other end of the connecting rod 4 is connected with the second moving pair 5 through the direction perpendicular to the fixed platform. The other end of the connecting rod 6 is connected with the third connecting rod 8 through the rotating pair 7, and the other end of the connecting rod 8 is connected with the moving platform 10 through the rotating pair 9, wherein the directions of the moving pairs P1 and P2 are perpendicular to each other. The axis of R1 is parallel to the moving pair P1, the axes of the rotating pair R1 and R2 are perpendicular to eac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More