

Method for realizing the assembly of shaft hole having high-precision by using robot having low precision
A robot and high-precision technology, applied in the field of robots, can solve problems such as difficult high-precision assembly, and achieve the effect of improving the scope of use
Active Publication Date: 2007-09-26
惠州中科先进制造有限公司
View PDF0 Cites 27 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
The positioning accuracy of the current robot is 0.10mm, and it i
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Example Embodiment
Specific Example 1
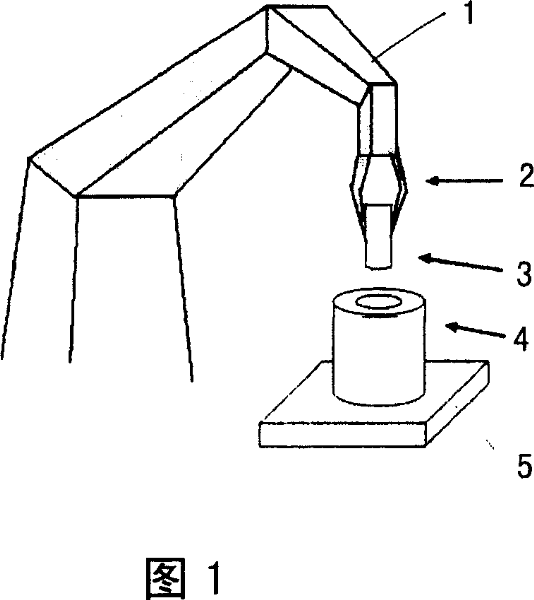
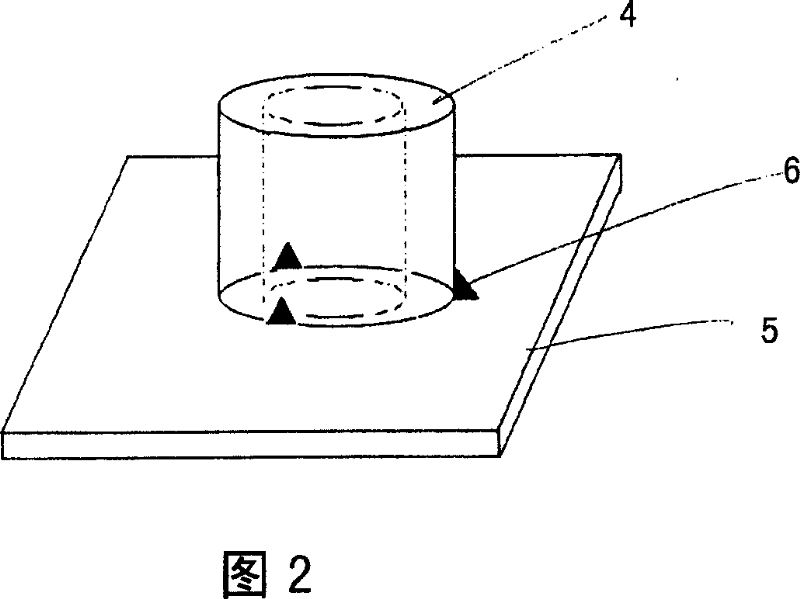
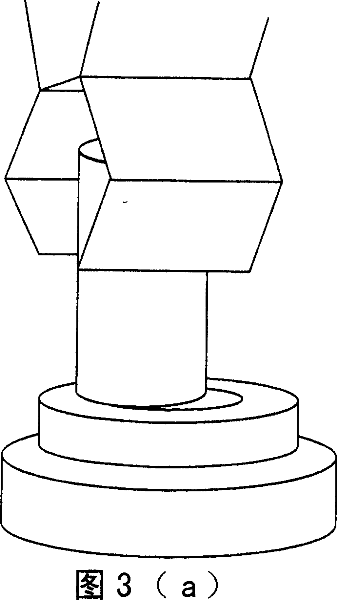
[0081] Taking the RTX (repeatability 0.2mm) robot as an example, the method of the present invention can realize the assembly of the following circular shaft 3 and circular hole 4: The radius of the hole 4 is R n = 20.01mm, the radius of shaft 3 is R P = 19.98mm, the length of the shaft 3 is 50mm, the assembly process is shown in Figure 3.
Example Embodiment
Specific Example 2
[0082] Take the RTX (repetition accuracy of 0.2mm) robot as an example, the method of the present invention can realize the assembly of the following triangular axis 3 and triangular hole 4: The radius of the hole 4 is R n = 20.01mm, the radius of shaft 3 is R P = 19.98mm, the length of the shaft 3 is 50mm, the assembly process is shown in Figure 4.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention relates to a method for realizing shaft and hole mating with high accuracy by low-accuracy robot, comprising following steps. (1) bowl constraint field is found in high dimension space of six-dimension space of shaft and hole; (2) positive output signal of the bowl constraint field and the robot without any feedback is used to make the shaft and hole system arrives the state corresponding with the presetting special point of bowl constraint field so as to decrease errors of position and angle; (3) the field formed by the special point in new space is original field to find the new bowl constraint so as to eliminate errors of position and angle furthermore until the shaft inserts into the hole.
Description
technical field [0001] The invention relates to the technical field of robots, in particular how to use a low-precision robot to realize a high-precision, high-reliability and low-cost two-high and one-low assembly operation method using constraints. Background technique [0002] my country is a big manufacturing country, but due to the low degree of automation, it is not yet a strong manufacturing country. To maintain my country's status as a major manufacturing country and the momentum of national economic development, it is necessary to greatly increase the automation of the manufacturing industry, and robots are the first choice. [0003] The use of robots in manufacturing has been studied for three decades. However, robots are not widely used in manufacturing. The repeatability of existing industrial robots is about 0.1mm. High-precision assembly requires 0.01-0.02mm. Existing technologies using force sensors or flexible wrists cannot guarantee reliability (force se...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): B23P19/04B25J9/10B25J19/00
Inventor乔红
Owner惠州中科先进制造有限公司