

Device for elevator
A technology for elevators and stop devices, applied in transportation and packaging, elevators, etc., can solve the problems of slow braking force and time-consuming
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] Hereinafter, preferred embodiments of the present invention will be described with reference to the drawings.
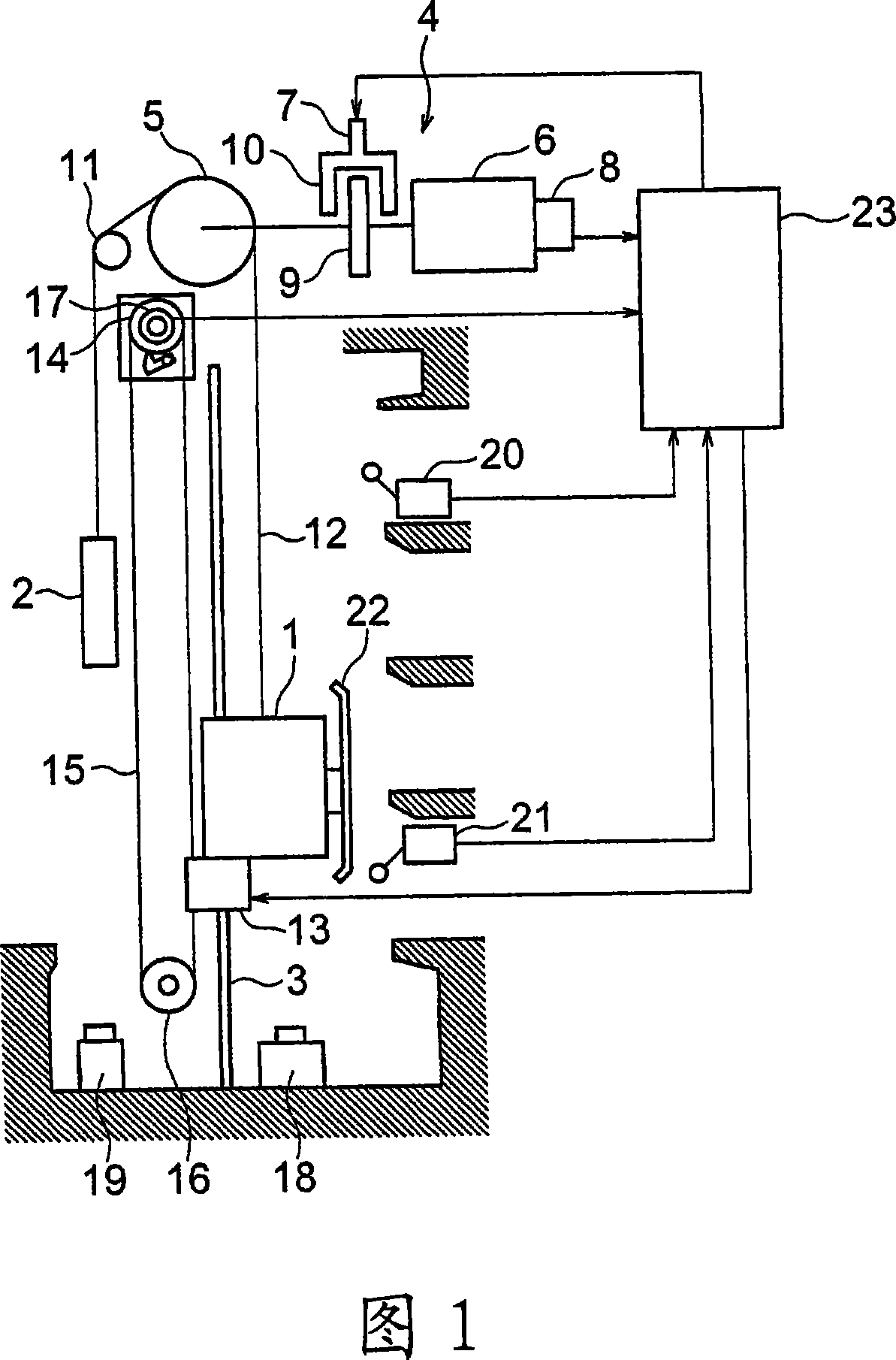
[0016] Fig. 1 is a configuration diagram showing an elevator apparatus according to Embodiment 1 of the present invention. The car 1 and the counterweight 2 as a lifting body are raised and lowered in the hoistway. A car guide rail 3 for guiding the raising and lowering of the car 1 and a counterweight guide rail (not shown) for guiding the raising and lowering of the counterweight 2 are provided in the hoistway.
[0017] On the upper part of the hoistway, a hoist 4 for raising and lowering the car 1 and the counterweight 2 is installed. The hoist 4 has a drive pulley 5, a motor 6 that rotates the drive pulley 5, a hoist brake 7 that brakes the rotation of the drive pulley 5, and a pulley speed detector that detects the rotation speed of the drive pulley 5 (the rotation speed of the rotation shaft of the motor 6). device 8. As the pulley speed detector 8, f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More