

Safe type mechanical arm
A mechanical arm and safety technology, applied in the direction of manipulators, claw arms, joints, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The embodiments of the present invention are described in detail below: the present embodiment is implemented under the premise of the technical solution of the present invention, and detailed implementation and specific operation process are provided, but the protection scope of the present invention is not limited to the following implementation example.
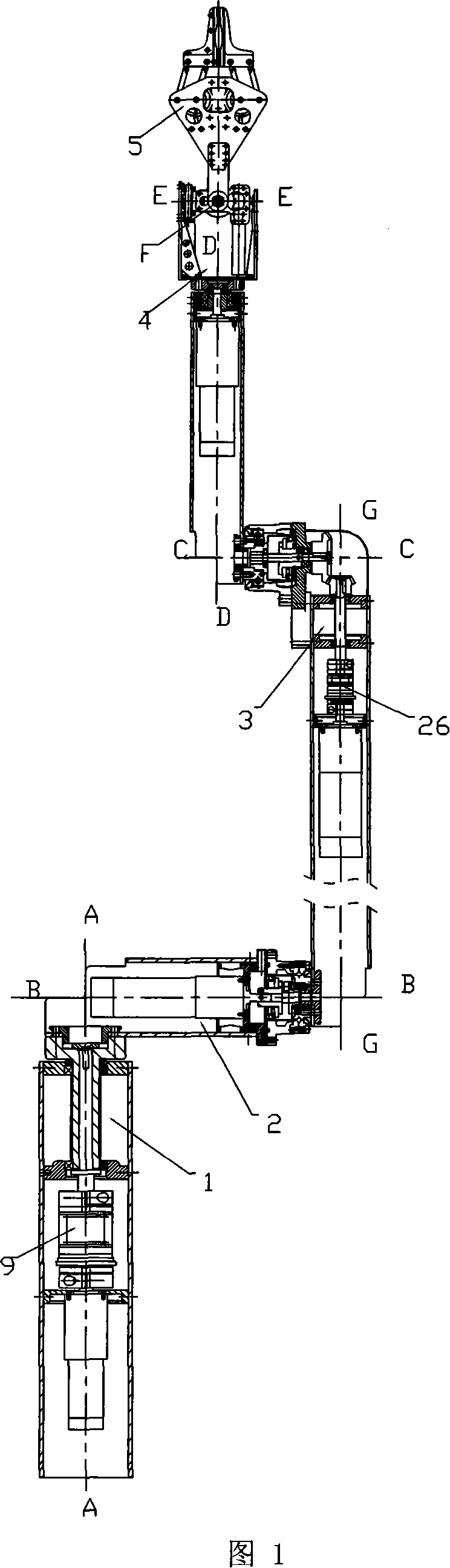
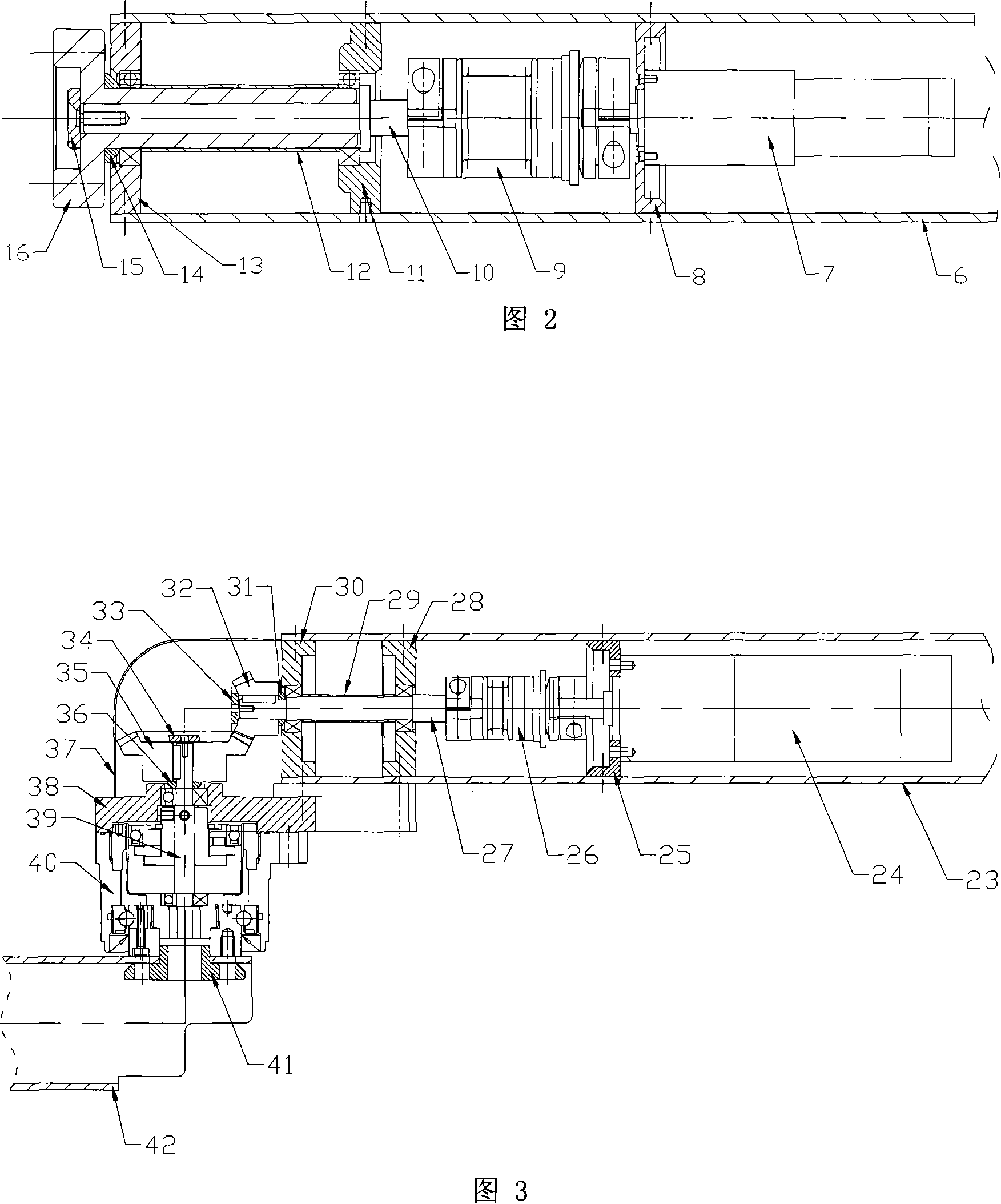
[0018] As shown in Figure 1, Figure 2 and Figure 3, this embodiment includes: waist joint 1, shoulder joint 2, elbow joint 3, wrist joint 4, hand claw 5, waist joint torque limiter 9, elbow joint torque limiter 26 . Among them: the waist joint 1, the shoulder joint 2, and the elbow joint 3 each have one degree of freedom of rotational swing, the wrist joint 4 has three orthogonal rotational degrees of freedom, and the hand claw 5 has one degree of freedom of opening and closing movement. The waist joint torque limiter 9 is arranged in the waist joint 1, and the elbow joint torque limiter 26 is arranged in the elbow...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More