

Three-dimensional posture fixing and local locating method for lunar surface inspection prober
A positioning method and a technology of three-dimensional attitude determination, which are applied in three-dimensional position/course control, attitude control, navigation through speed/acceleration measurement, etc., can solve the problem of not considering roll and pitch angles, terrain height changes, and engineering application realization Difficulty and other problems, to achieve the effect of improving positioning accuracy, reducing measurement, and reducing errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0033] Define the "east-north-sky" lunar coordinate system as the navigation coordinate system, and take 3-2-1 (that is, first around the Z axis, then around the Y axis, and then the X axis) sequence as an example to define the coordinates of the patrol detector body Euler angles of the system relative to the navigation coordinate system θ and ψ are three-axis attitude angles, and the position relative to the origin of the navigation coordinate system is the local position. The lunar surface inspection probe takes the six-wheel rocker arm type as an example, of which six wheels are driven and four wheels are steered.
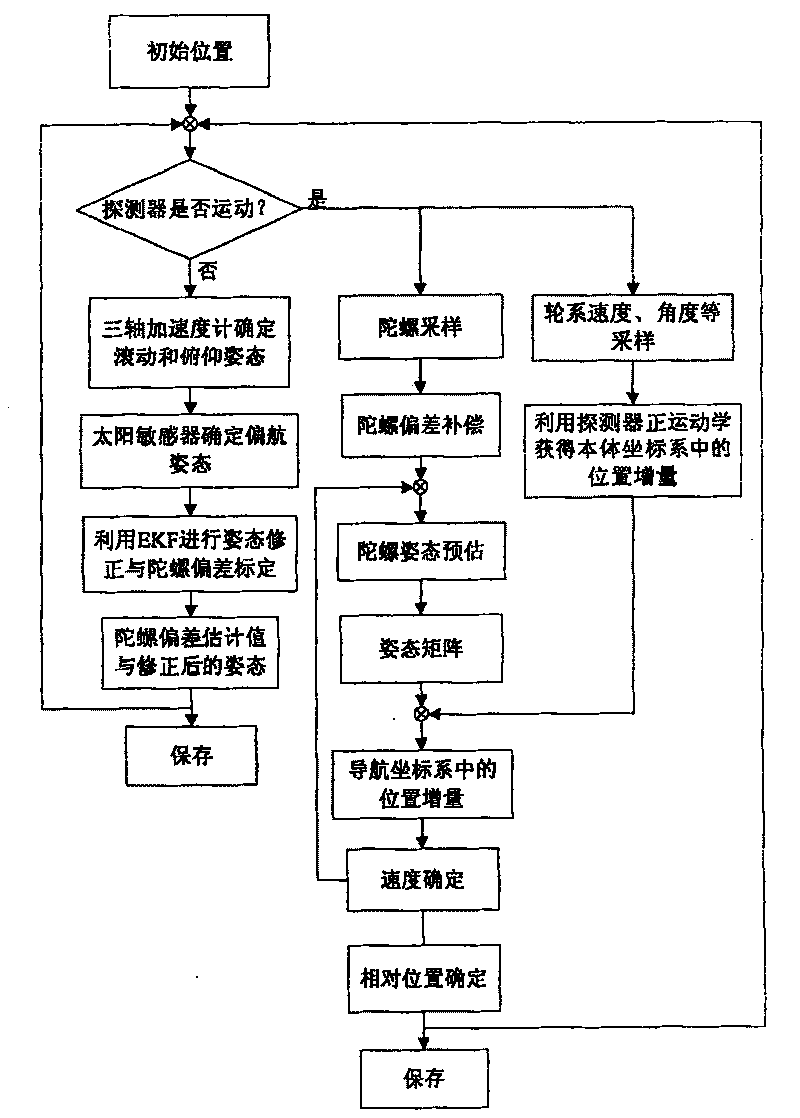
[0034] like figure 1 Shown, concrete steps of the present invention are as follows:
[0035] (1) When the lunar surface inspection probe is static, the three-axis accelerometer is used to sense the local gravitational acceleration, and the roll and pitch angles are obtained after conversion.
[0036] Let the outputs of the three accelerometers installed orth...
Embodiment 2
[0112] When the attitude angle is defined in other sequences, the analysis process is the same as above, and similar results can be obtained. In addition, for lunar patrol probes with different configurations, it is necessary to establish the motion relationship with each wheel in step (5) according to the kinematic model for speed and position determination, and the method is similar to that of embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More