

An industrial robot system with a teaching portable unit and a detecting unit for detecting when the tpu leaves the robot cell
一种工业机器人、机器人系统的技术,应用在工业机器人系统领域,能够解决TPU安全设备不起作用、TPU安全功能无效等问题
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
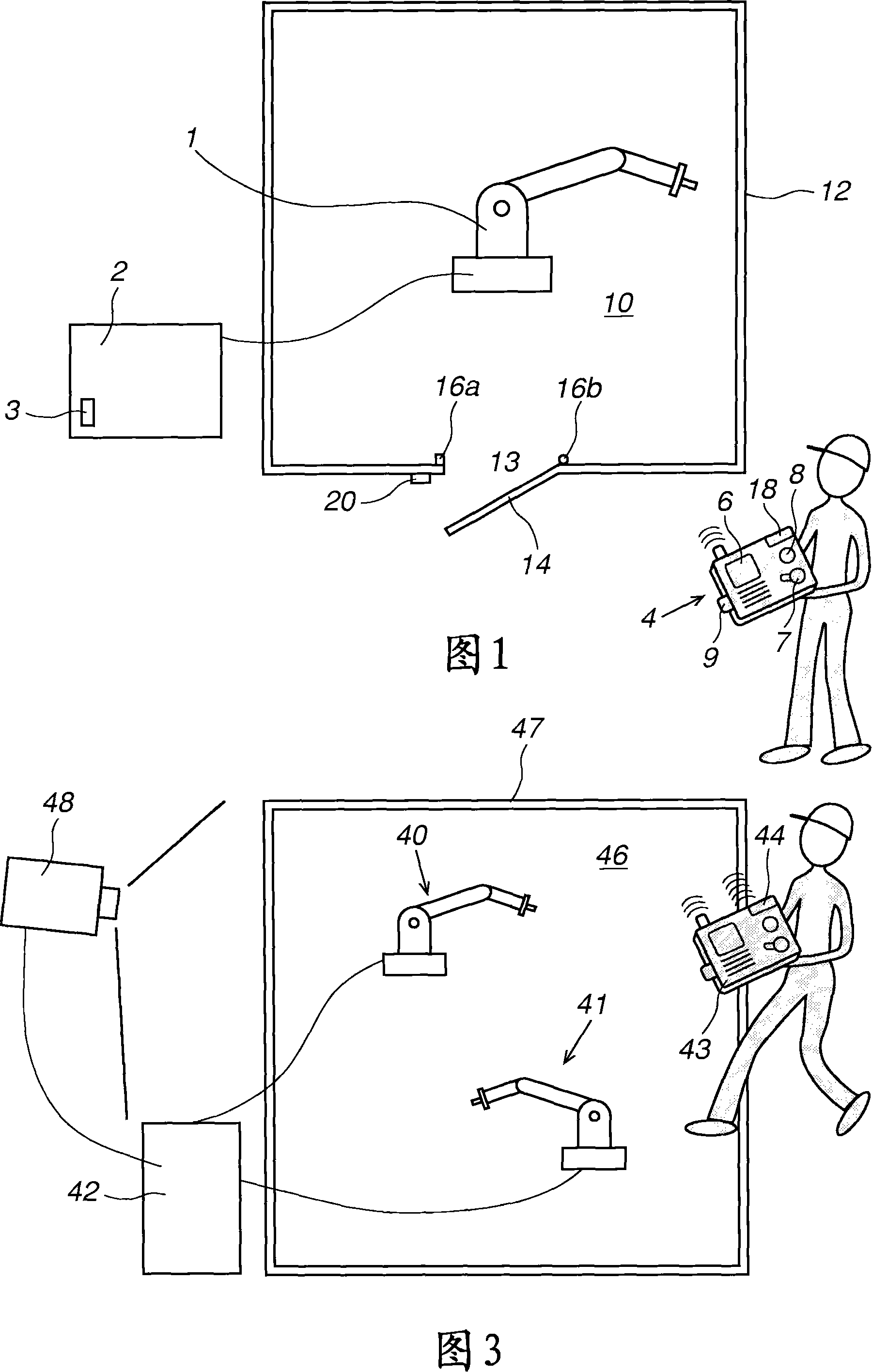
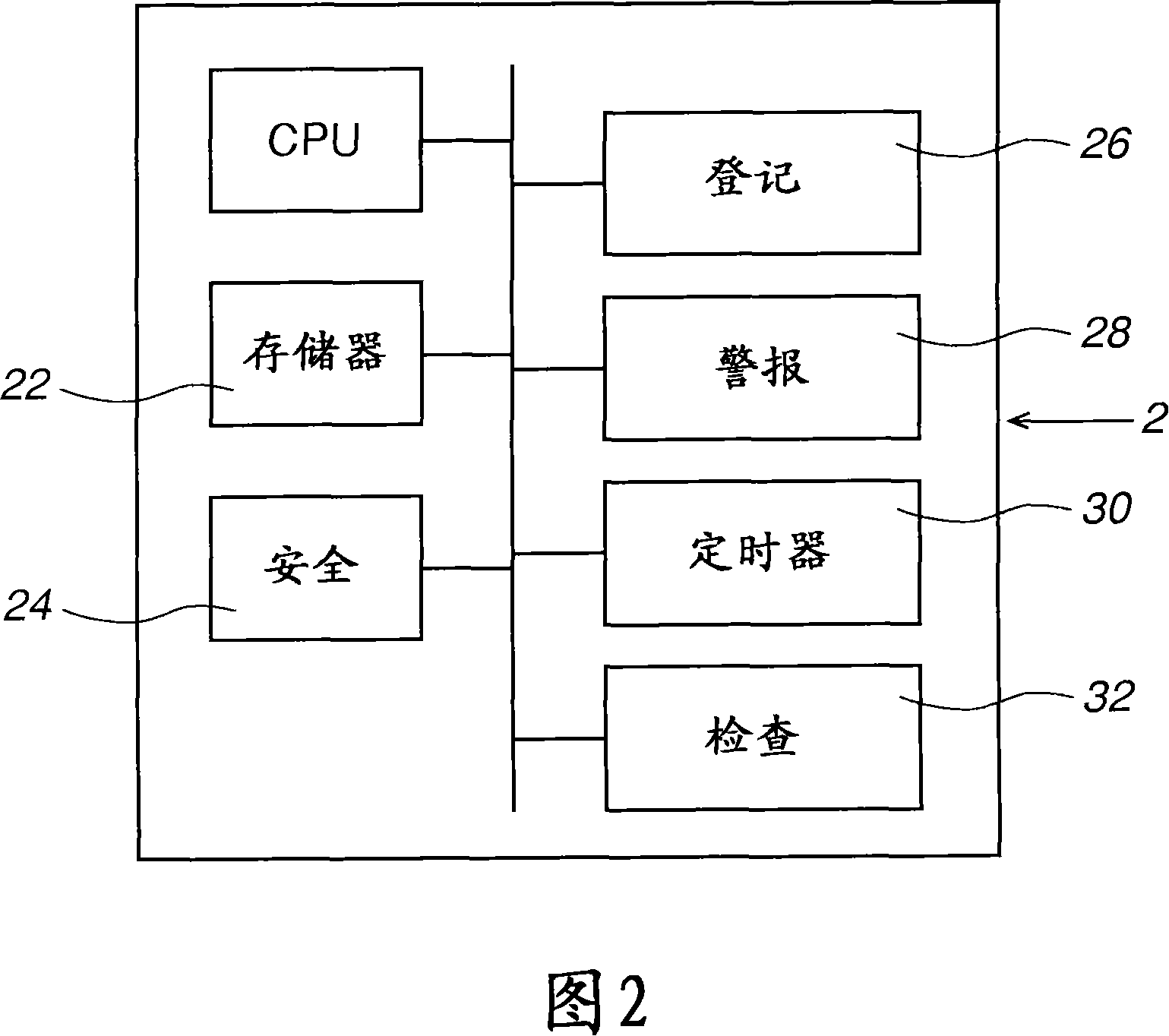
[0035] Fig. 1 shows an industrial robot system according to a first embodiment of the present invention. The robot system includes: a manipulator 1; a control unit 2 for controlling the manipulator 2; and a portable operator control device 4, hereinafter referred to as TPU (Teach Pendant Unit), for teaching and manually operating the manipulator. The control unit 2 comprises a switch 3 for switching between automatic and manual mode. The TPU communicates with the control unit 3 via a data link, eg a wireless data link. The TPU includes a display screen 6 , function keys, a joystick 7 , an emergency stop button 8 and an enabling device 9 . The TPU also includes an antenna and a radio module for wireless communication with the control unit 2 . The joystick 7 is used to control the movement of the manipulator when manually operating the robot.
[0036] The enabling means 9 comprise a button 12 which must be pressed by the operator to enable manual control of the robot via the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More