

Method for dividing working area of robot
A working area and robot technology, applied in the field of robotics, can solve the problems of robot moving speed limitation, lower robot work efficiency, complicated setting operations, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to achieve the above-mentioned purpose, the technical means and effects thereof adopted by the present invention are now given as preferred embodiments, and are described as follows in conjunction with the accompanying drawings.
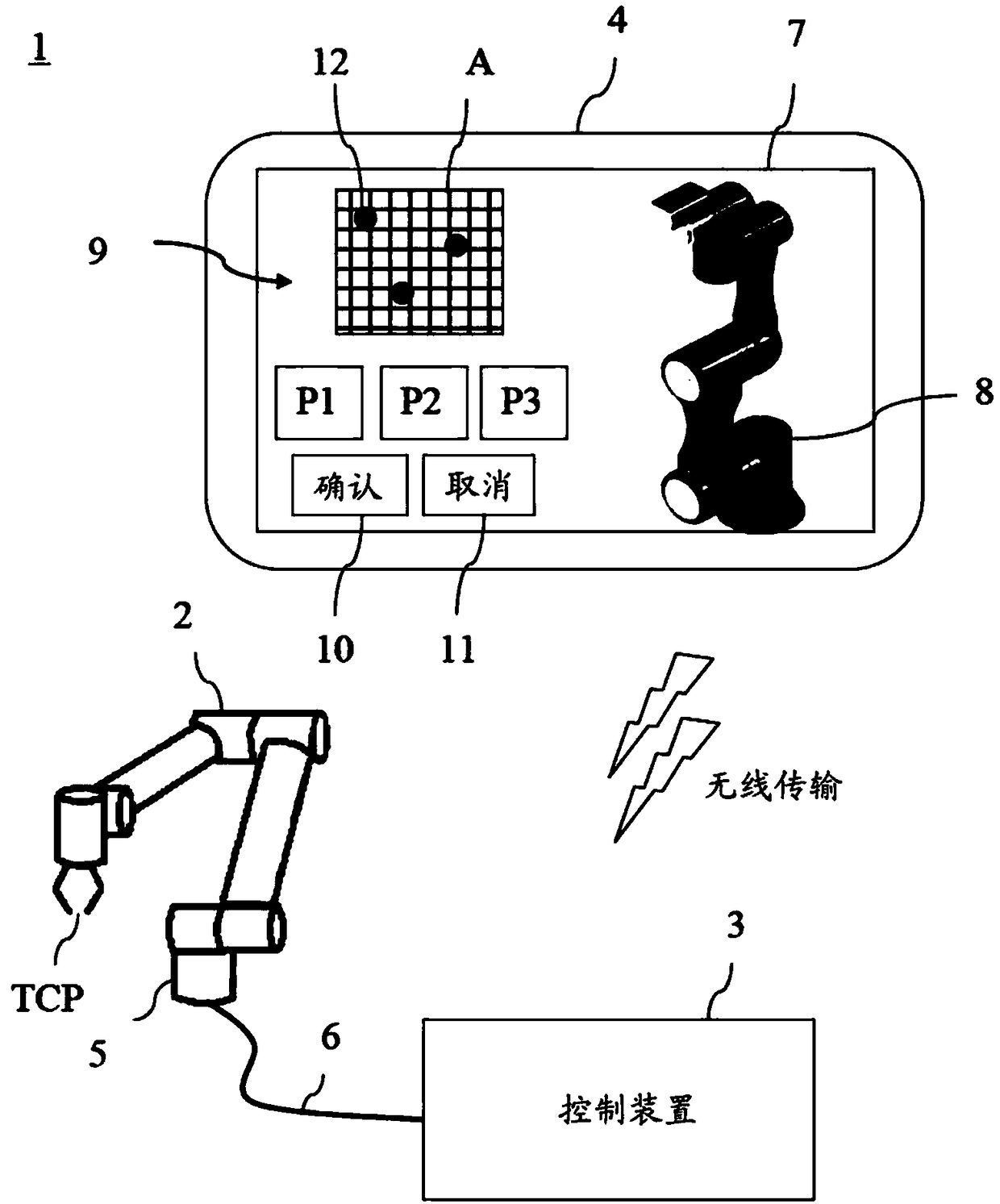
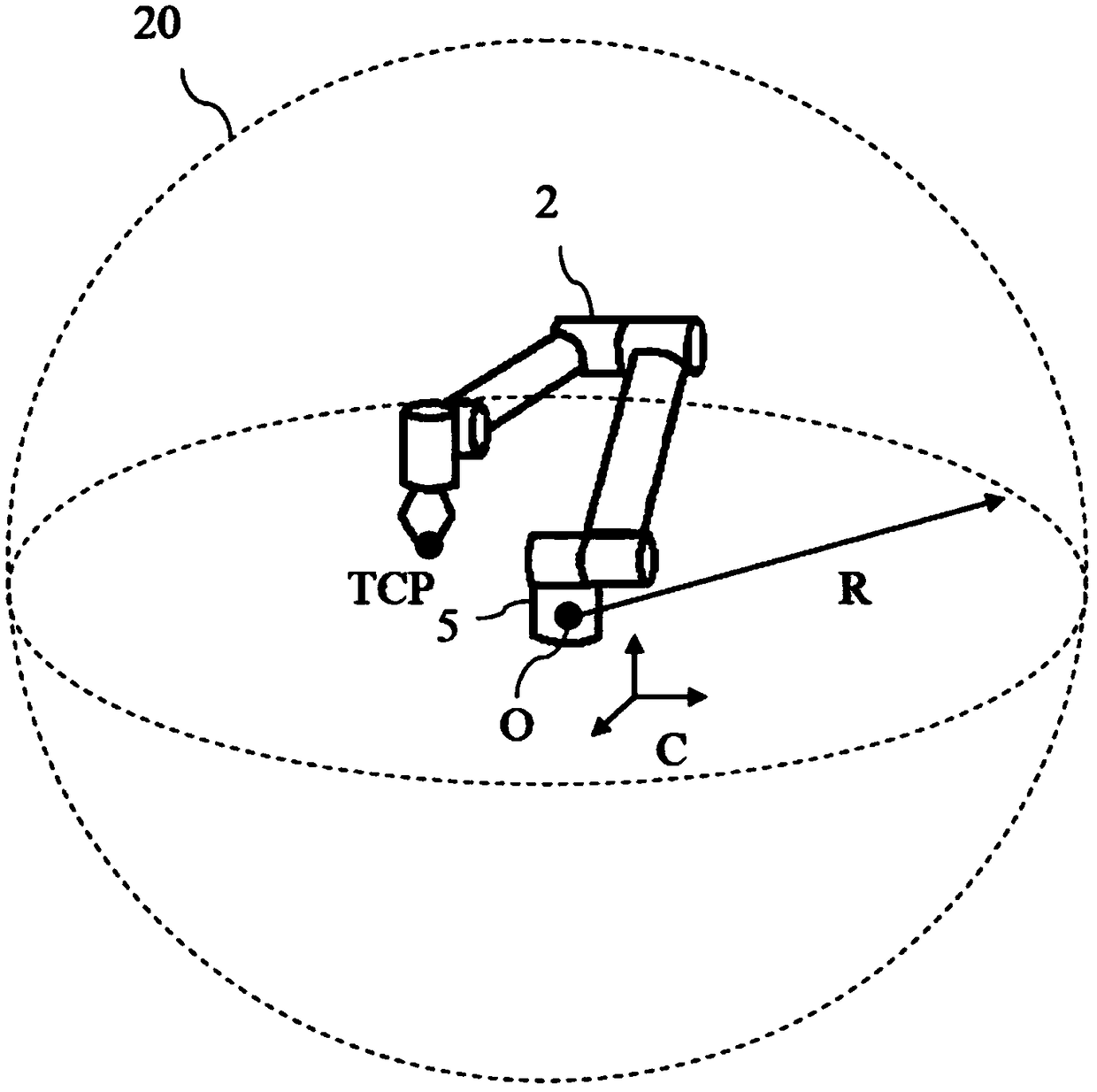
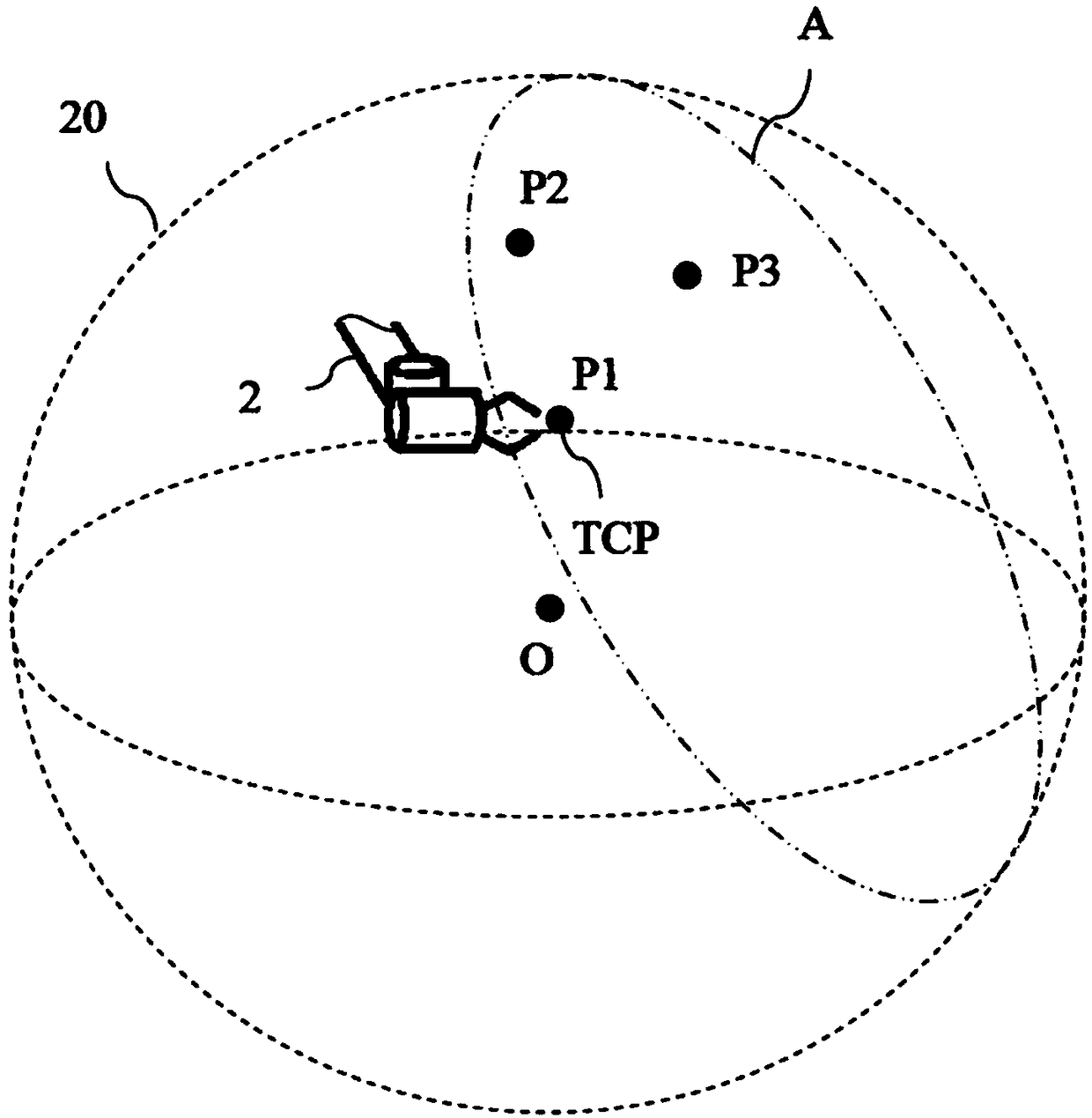
[0041] Please also refer to figure 1 , figure 2 and image 3 , figure 1 It is a schematic diagram of the robot control system of the present invention, figure 2 It is a schematic diagram of the working area of the robot of the present invention, image 3 Schematic diagram of the separation interface constructed for the present invention. figure 1 Among them, the robot control system 1 of the present invention includes a robot 2, a control device 3, a man-machine interface 4, and the like. The robot 2 is a multi-axis type, the fixed end is the base 5 , and the other end is the movable Tool Center Point (TCP). The control device 3 is connected to the robot 2 via a cable 6 for controlling the robot 2 to move the tool end TCP. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More