

Aircraft posture kinetics simplified model gain switching proportion-differential control design method
A technology of attitude dynamics and gain switching, applied in the field of aircraft control, can solve the problem that it is difficult to obtain the system step response without overshoot, no further discussion of the influence of the gain switching controller on the performance of the closed-loop system, and no discussion of the system step response Issues such as time domain indicators
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach ( 1
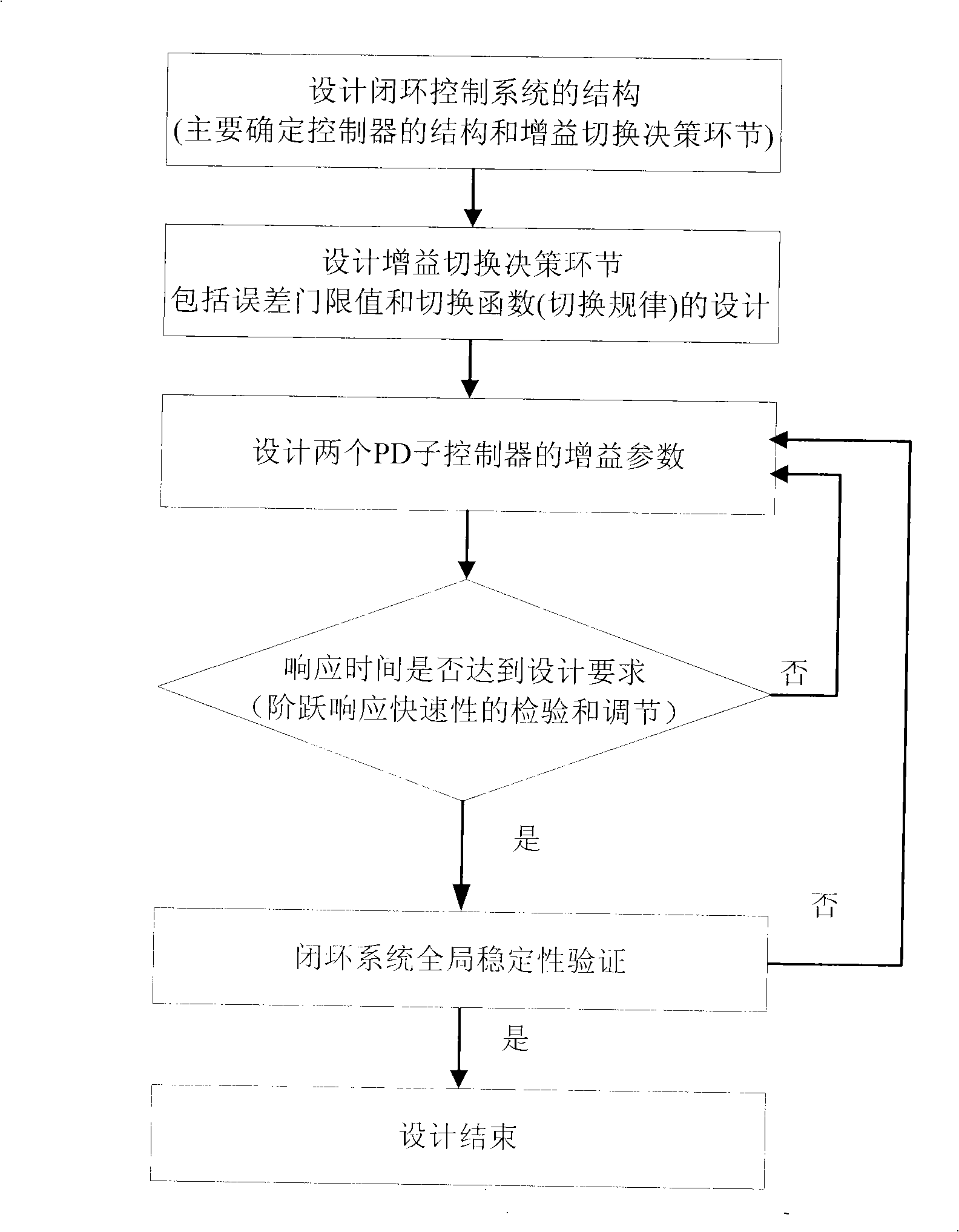
[0093] I design the structure of the closed-loop control system
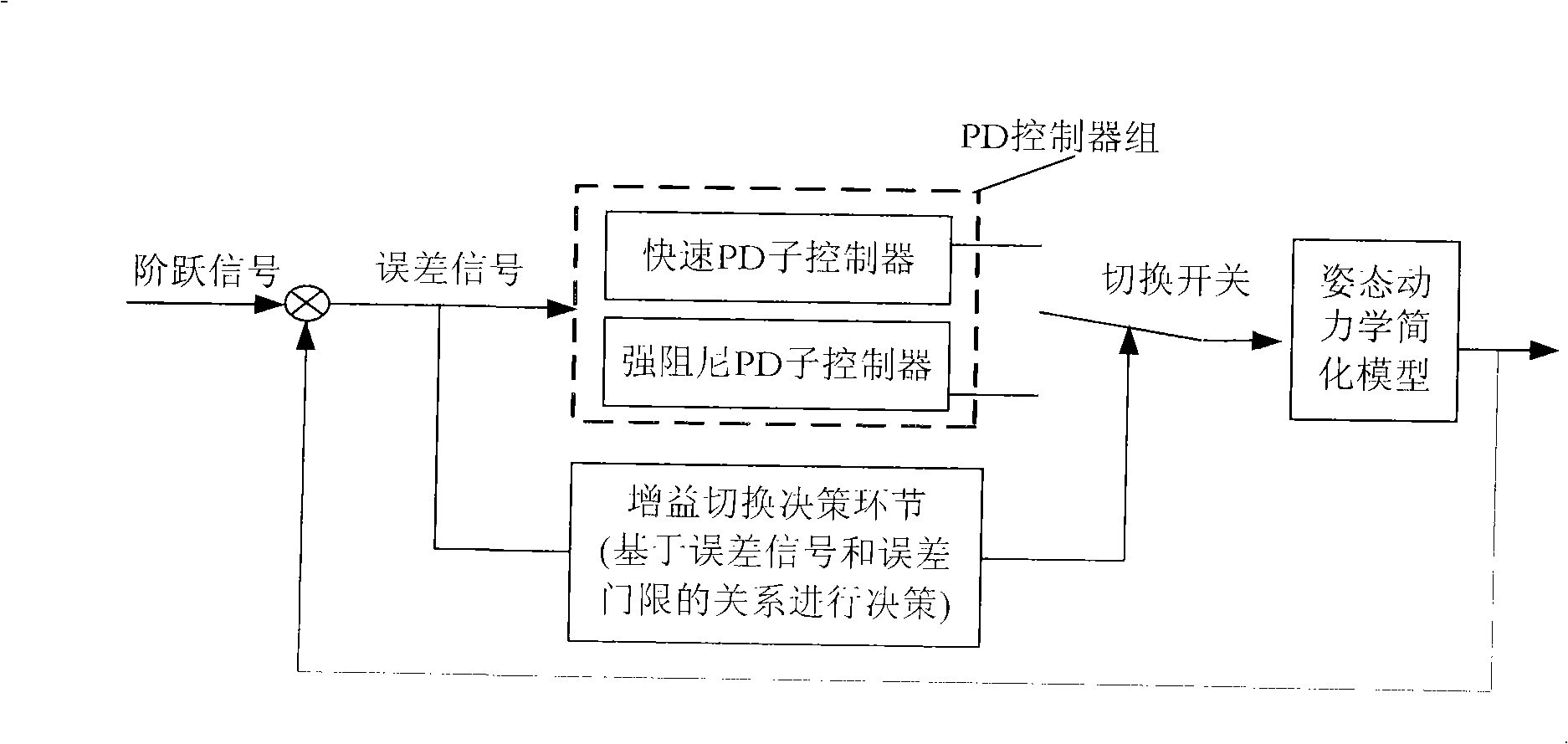
[0094] Such as figure 1 As shown, the unit negative feedback control structure of the output quantity (angle signal) is adopted. The connection of the three parts of the PD controller group structure, the gain switching decision-making link and the switching switch in the closed-loop control loop is shown in the attached figure 1 shown.
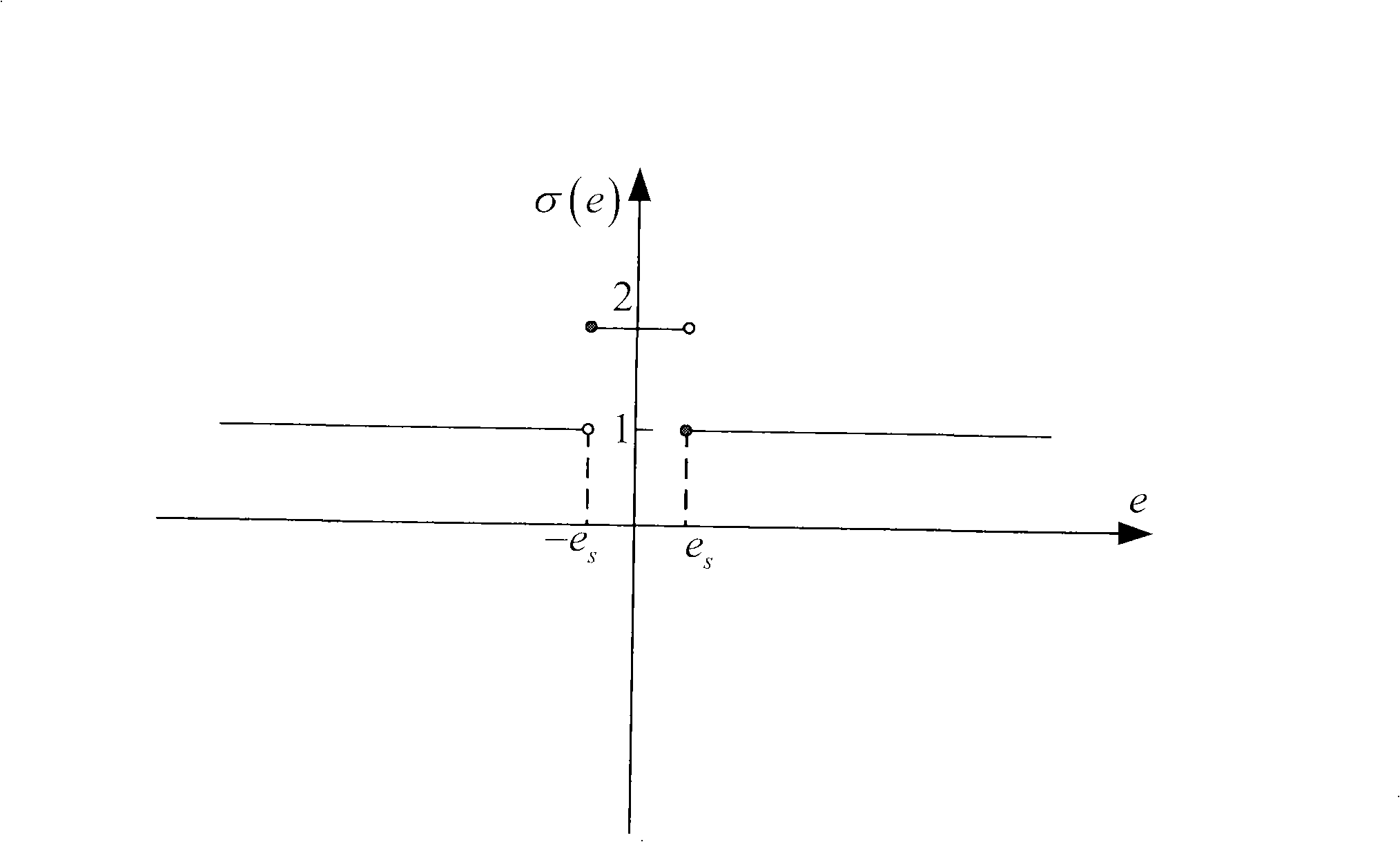
[0095] Using the .m language programming under the environment of Matlab 6.5, the structure and function of the gain switching decision link, switching switch and PD controller group are realized. That is, the input signal to realize the gain switching decision-making link is the error signal (obtained by subtracting the output signal from the reference signal), which is based on the relationship between the error signal and the error threshold (a designed constant value), and drives the switching according to the designed switching rule. The switch is used to connect the ...
Embodiment approach ( 2
[0123] I design the structure of the closed-loop control system
[0124] This step is exactly the same as the corresponding step in Embodiment (1).
[0125] II Design Gain Switching Decision Link
[0126] Within the value range (01), the selected error threshold e s = 0.4. The other designs are exactly the same as the corresponding steps in the implementation mode (1).
[0127] III Design the gain parameters of two PD sub-controllers
[0128] The content to be designed and related design methods are exactly the same as the corresponding steps in Embodiment (1), only the value of the initial parameter and the adjustment method of the parameter are different, and this difference is mainly introduced here.
[0129] The first small step: select an initial set of design parameters as k p1 = 3,k d1 = 1,k p2 = 1,k d2 =3, they obviously satisfy the first six inequality constraints of (4).
[0130] The second small step: combine this set of parameters and e s =0.4, press fi...
Embodiment approach ( 3
[0151] I design the structure of the closed-loop control system
[0152] This step is exactly the same as the corresponding step in Embodiment (1).
[0153] II Design Gain Switching Decision Link
[0154] This step is exactly the same as the corresponding step in Embodiment (2), that is, take e s = 0.4.
[0155] III Design the gain parameters of two PD sub-controllers
[0156] The content and related design method of this step are exactly the same as the corresponding steps in the embodiment (two), and the selection and adjustment process of the parameters are also exactly the same, that is: a set of controller parameters initially selected is: k p1 = 3,k d1 = 1,k p2 = 1,k d2 = 3; then adjust k p1 making it equal to 2 while keeping the other parameters constant, thus choosing e s =0.4,k p1 = 2,k d1 = 1,k p2 = 1,k d2 =3.
[0157] IV Inspection and Adjustment of Quickness of Step Response
[0158] In conjunction with the analysis of the IV step in the implementatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More