

Wall climbing robot
A wall-climbing robot and clutch technology, applied in the field of wall-climbing robots, can solve problems such as flexible flipping and affecting the application range, and achieve the effect of improving adaptability and strong ability to cross obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
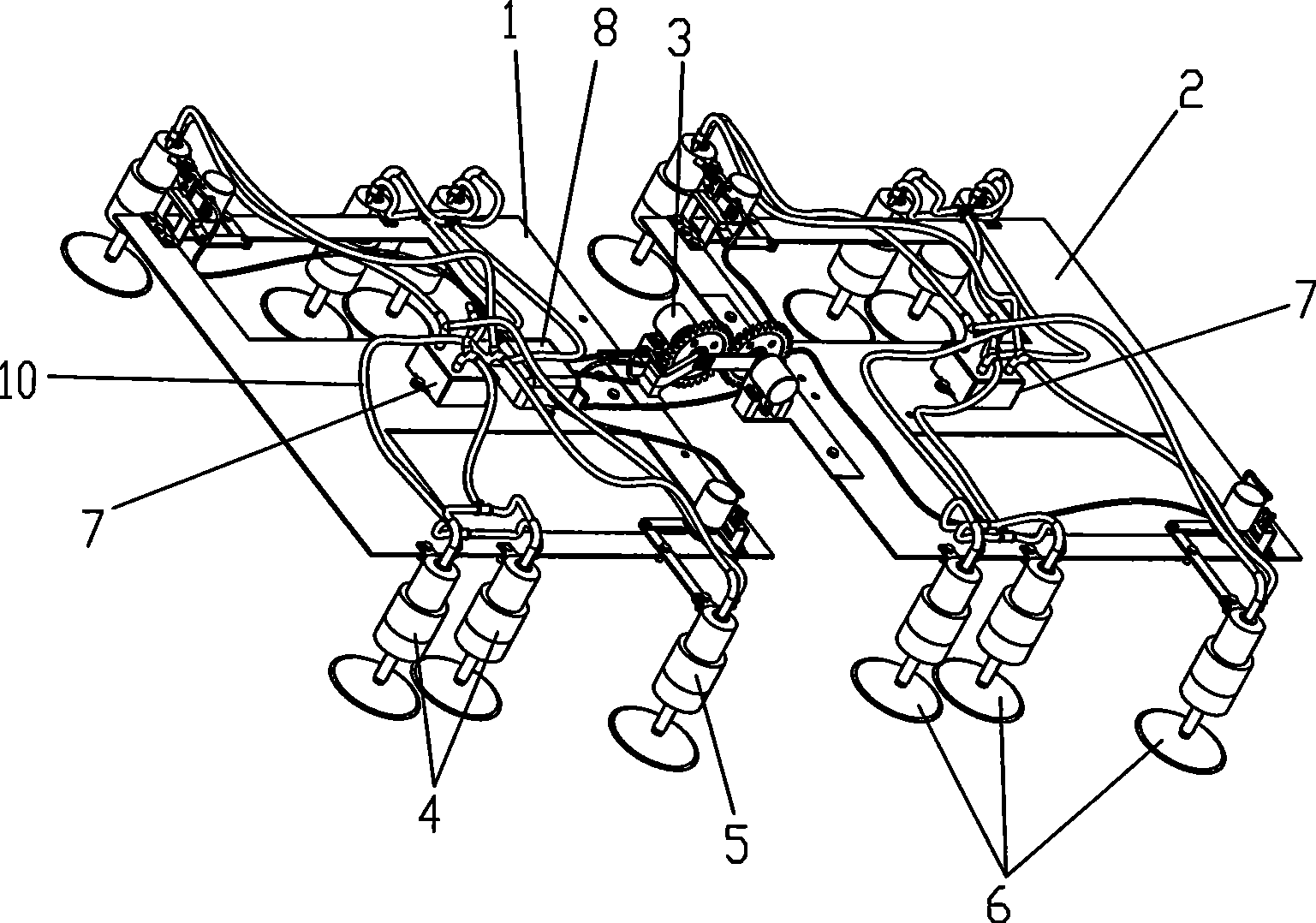
[0032] The structure of the present invention will be further described in detail below in conjunction with the description of the drawings and specific embodiments.
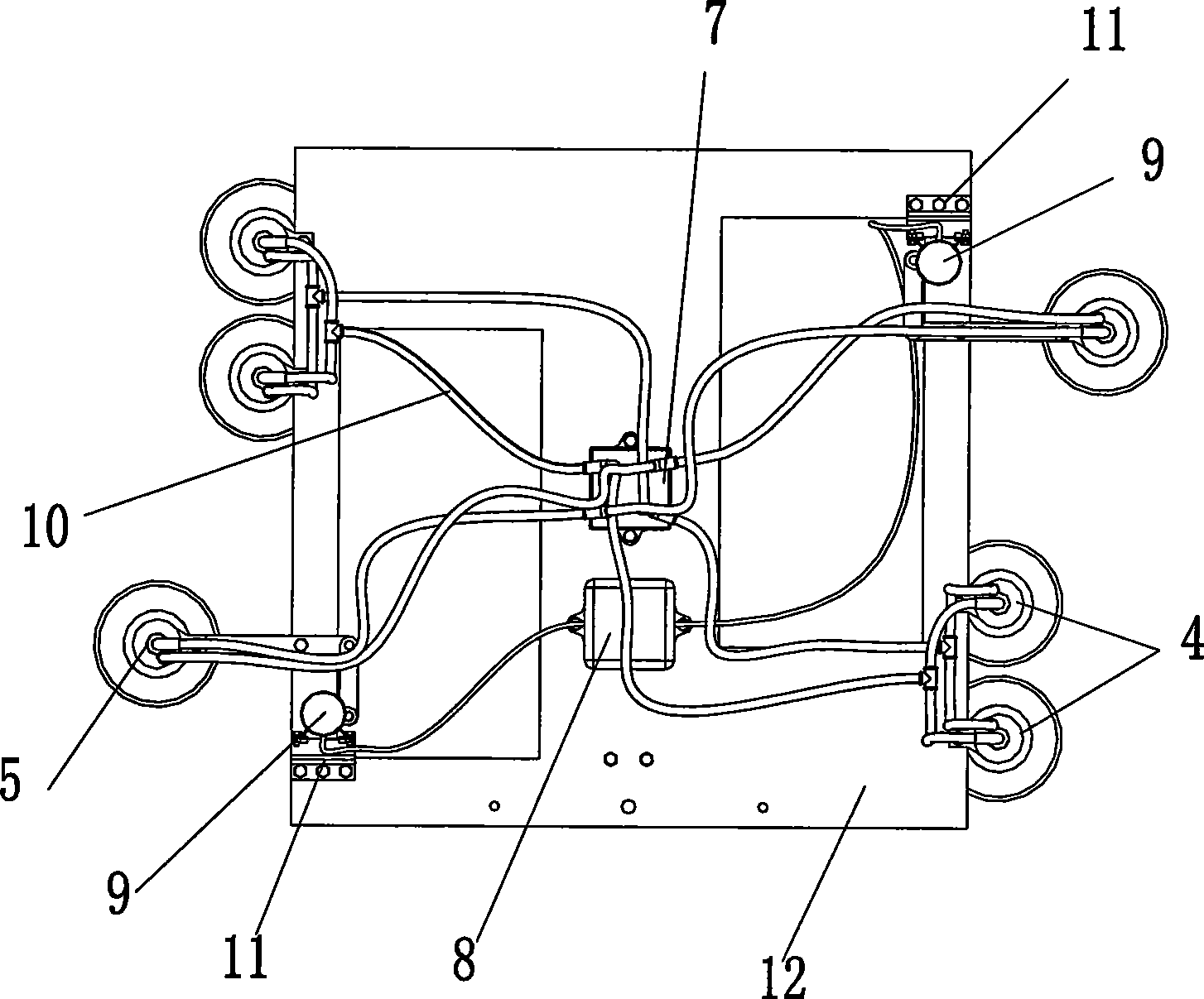
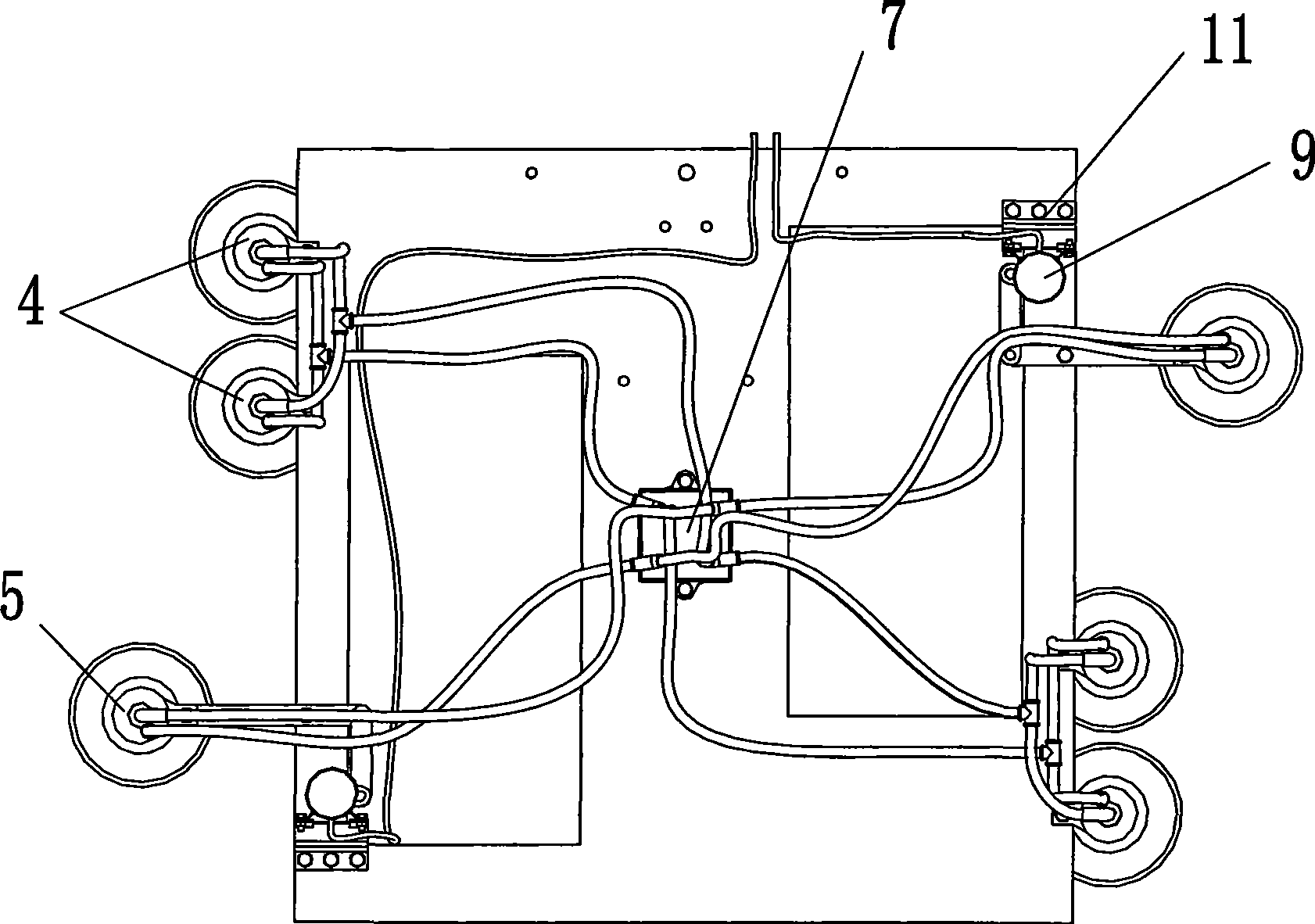
[0033] refer to figure 1 , the wall-climbing robot of the present invention includes a front body 1, a rear body 2, a waist turning mechanism 3, and a control unit that coordinates the movement of the front body, the rear body, and the waist turning mechanism. Both sides of the front and rear bodies 1 and 2 are provided with supporting legs 4 and walking legs 5 respectively, and the supporting legs 4 and walking legs 5 on both sides are arranged diagonally, and the bottoms of the supporting legs 4 and walking legs 5 are respectively provided with suction cups 6 . The control unit includes an air pump 7 and a controller 8. The controller 8 is arranged on the front body 1. The front and rear bodies 1 and 2 are respectively provided with an air pump 7. The air pump 7 is connected to the bottom of the supporting leg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More