

Exoskeleton mechanism based on parallelogram connection-rod and wire rope
A parallelogram, link mechanism technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as bloated mechanisms, complex control strategies, and the drive device and exoskeleton mechanism are not integrated, achieving compact structure, integrated The effect of high chemical degree and strong bearing capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
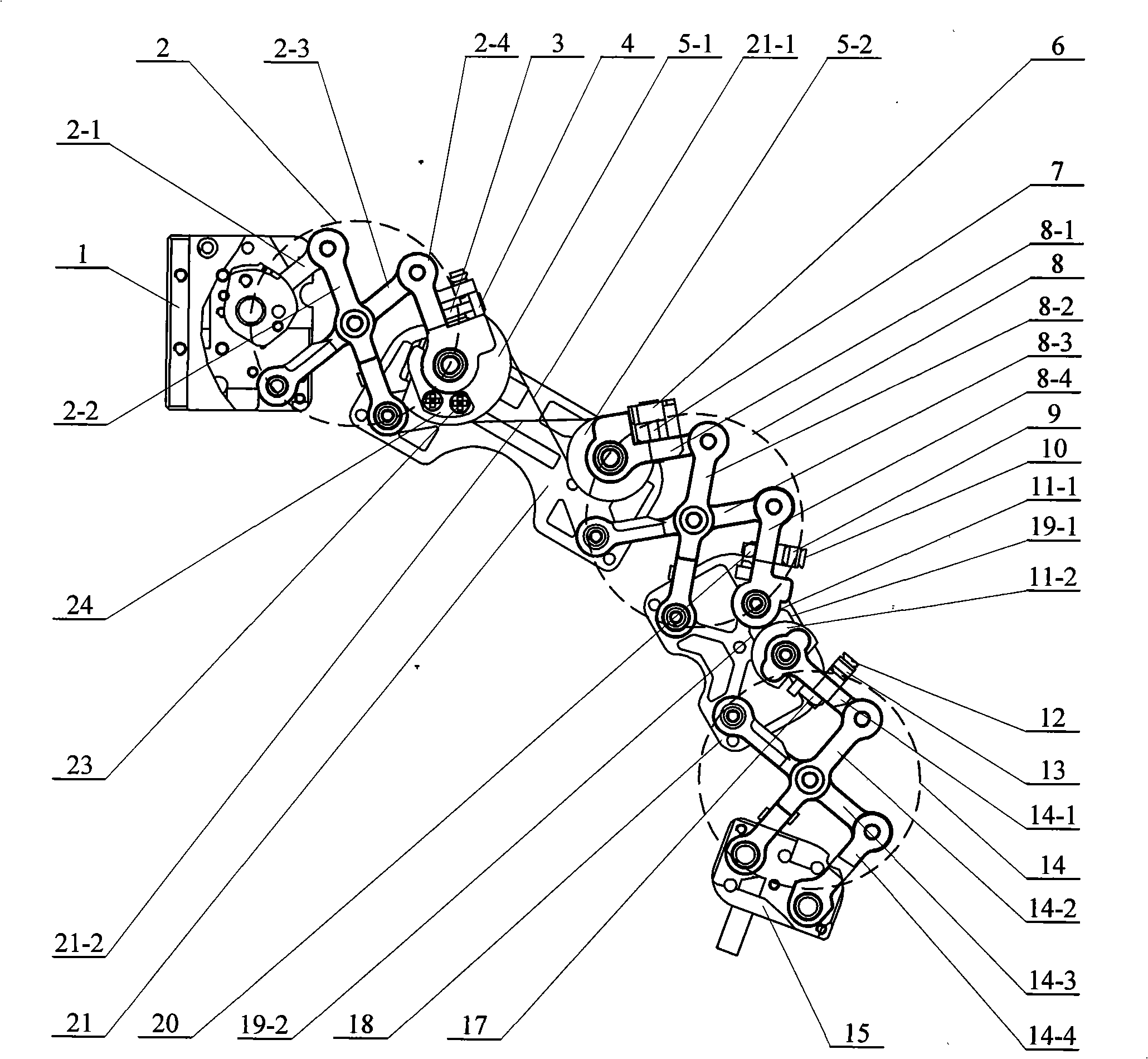
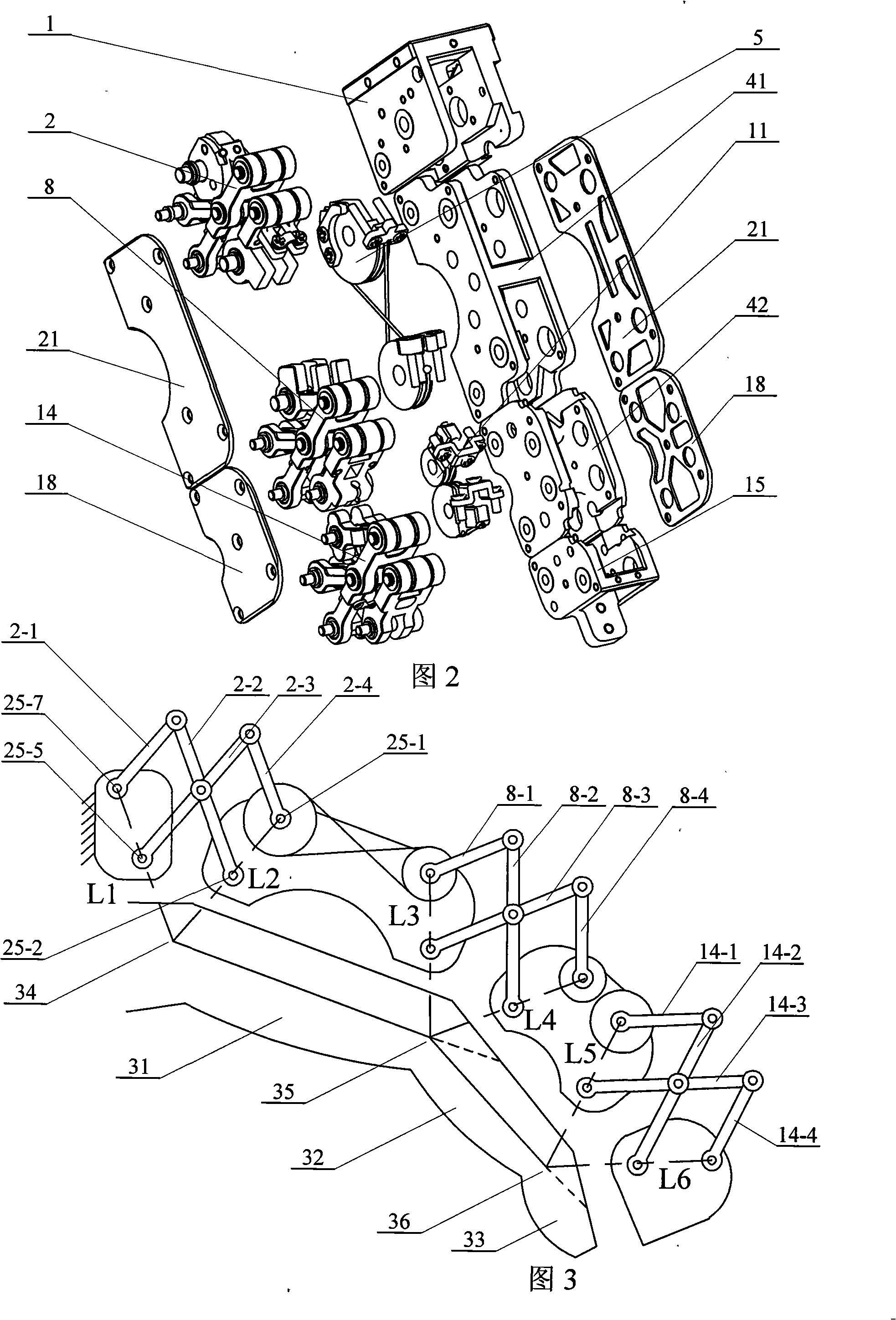
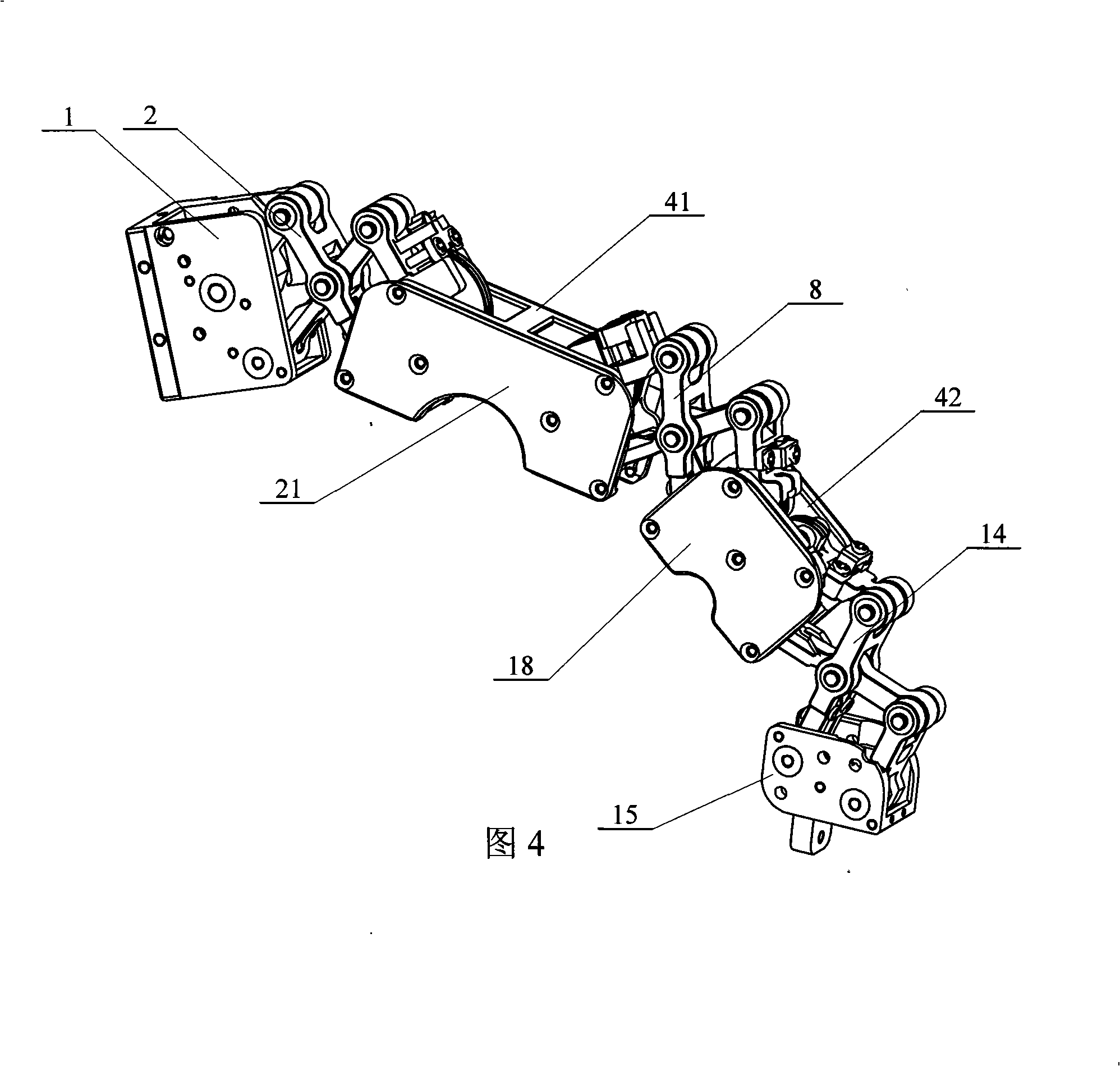
[0006] Specific implementation mode one: (see Figure 1 to Figure 4 ) This embodiment consists of the first frame 1, the second frame 41, the third frame 42, two first connecting plates 18, two second connecting plates 21, fingertip interface 15, the first parallelogram connecting rod Mechanism 2, the second parallelogram linkage mechanism 8, the third parallelogram linkage mechanism 14, the first wire rope transmission mechanism 5, and the second wire rope transmission mechanism 11, and the two first connecting plates 18 are respectively arranged on the third frame 42 on both sides, two second connecting plates 21 are arranged on both sides of the second frame 41 respectively, and the first parallelogram linkage mechanism 2 consists of the first connecting rod 2-1, the second connecting rod 2 -2, the third connecting rod 2-3 and the fourth connecting rod 2-4 are composed, and the second parallelogram linkage mechanism 8 is composed of No. 1 connecting rod 8-1, No. 2 connectin...
specific Embodiment approach 2
[0008] Specific implementation mode two: (see Figure 1 to Figure 4 ) The transmission ratio of the first wire rope transmission mechanism 5 in this embodiment is 1:1.4, and the transmission ratio of the second wire rope transmission mechanism 11 is 1.4:1. Others are the same as in the first embodiment.
specific Embodiment approach 3
[0009] Specific implementation mode three: (see Figure 1 to Figure 4 ) The first frame 1, the second frame 41, the third frame 42, the two first connecting plates 18, the two second connecting plates 21, the fingertip interface 15, the first parallelogram connecting plate described in this embodiment The materials of the rod mechanism 2 , the second parallelogram linkage mechanism 8 and the third parallelogram linkage mechanism 14 are all LC4. Others are the same as in the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More