Mechanical paw device of robot
A technology of manipulator claws and robots, which is applied in the field of manipulators, can solve the problems of affecting the work effect, poor posture, and asynchronous opening of two sets of claws.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
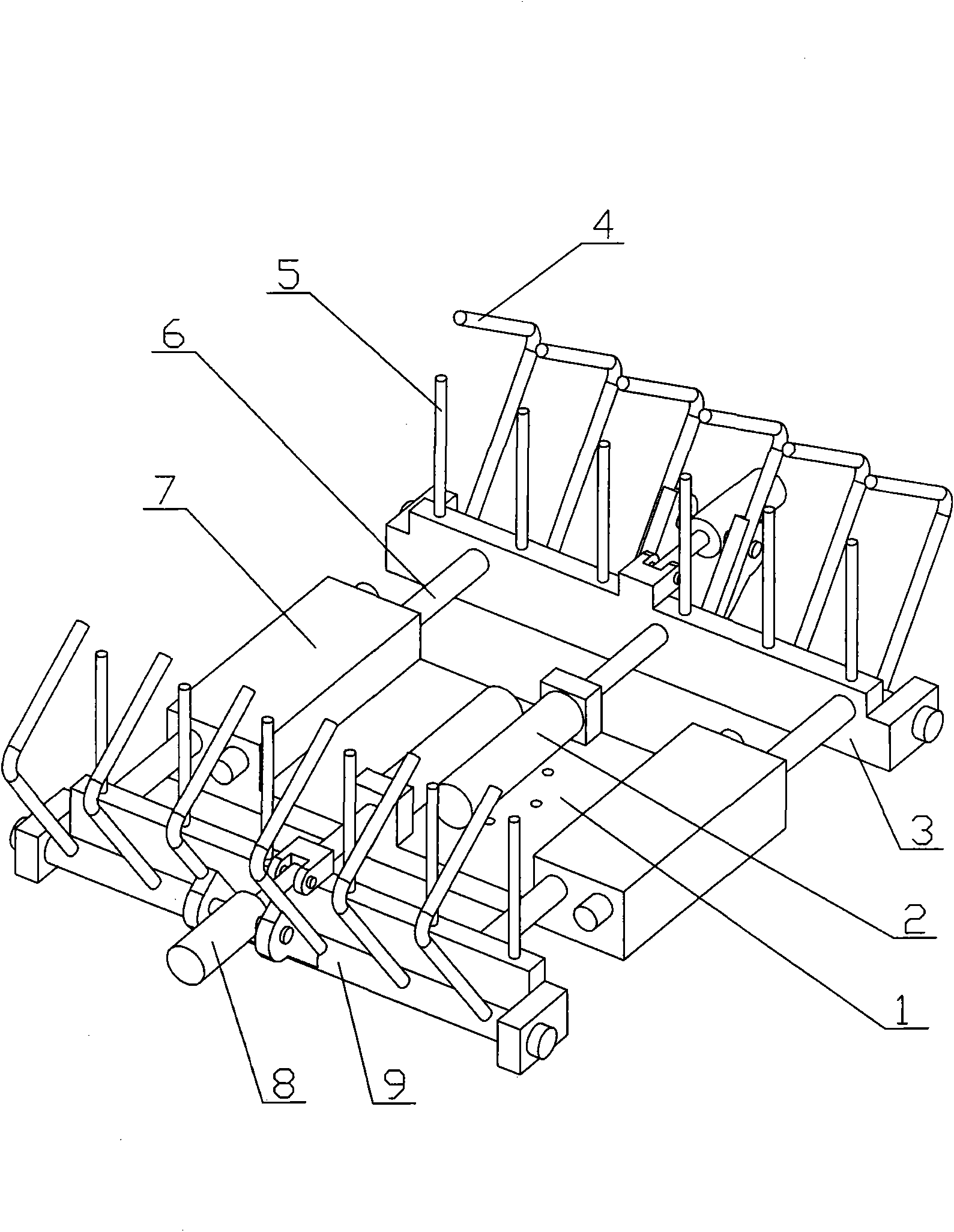
[0008] Below further illustrate the present invention by embodiment:
[0009] Referring to the accompanying drawings, the two sides of the connecting plate 1 are provided with two symmetrical movable brackets 3 supported on the sliding guide mechanism. Each movable bracket 3 is provided with a group of claws 4 installed on the rotating shaft 9 and a group of claws 5 mounted on the movable bracket and located inside the claws. The two groups of claws are parallel and symmetrical, and the rotating shaft 9 is connected with the claw drive cylinder 8, and each movable support 3 is connected with a claw drive cylinder 2 fixed on the connecting plate respectively, and the two claw drive cylinders have the same specifications and run synchronously. The two movable supports can also be connected with a pawl driving cylinder and a linkage mechanism to realize synchronous operation.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com