

Two-degrees-of-freedom translation parallel robot mechanism
A technology of robot and degree of freedom, applied in manipulators, manufacturing tools, etc., can solve problems such as dynamic asymmetry, high assembly requirements, and low attitude retention of the moving platform, and achieve improved attitude retention, high operating accuracy, and simple design Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
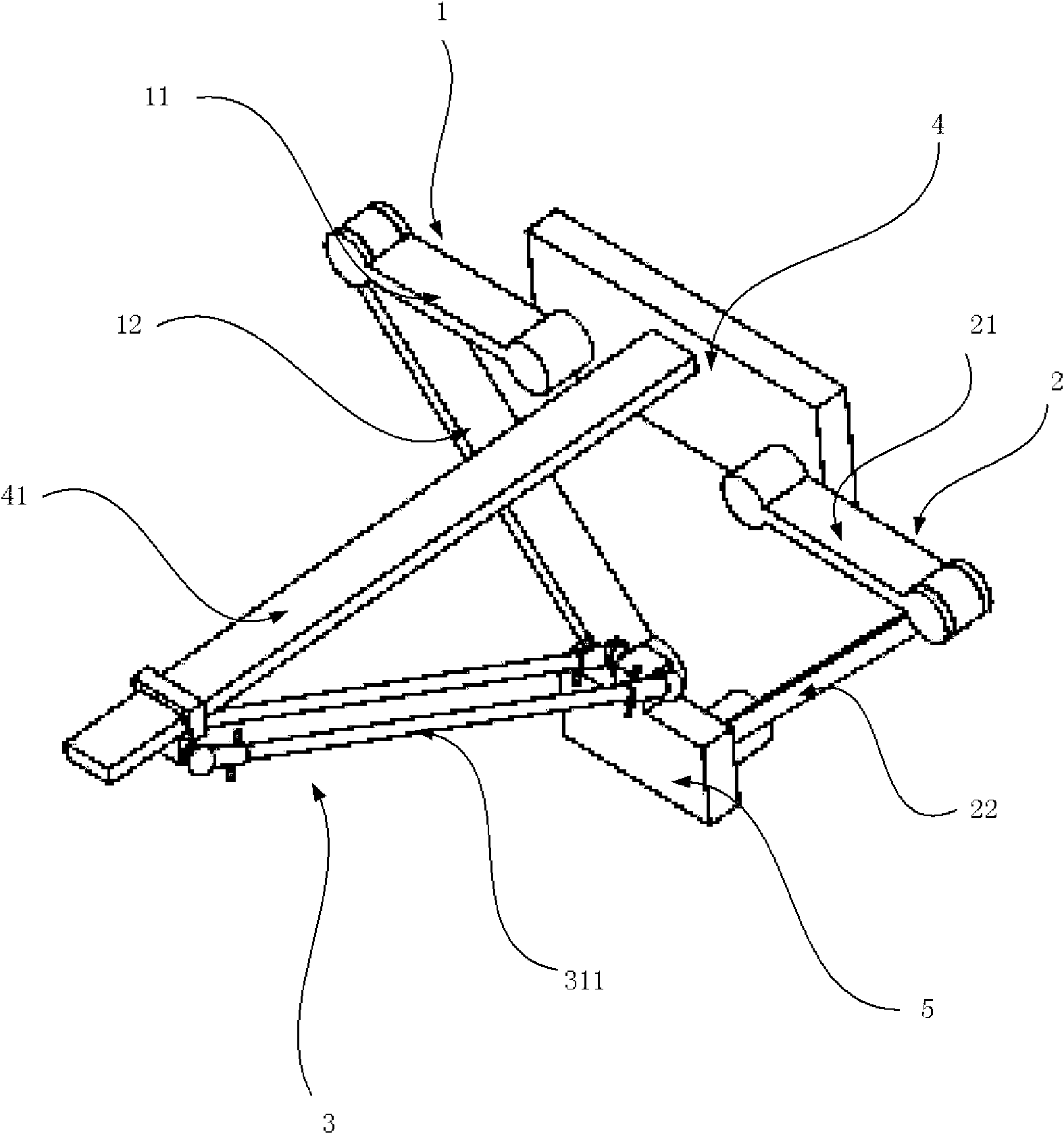
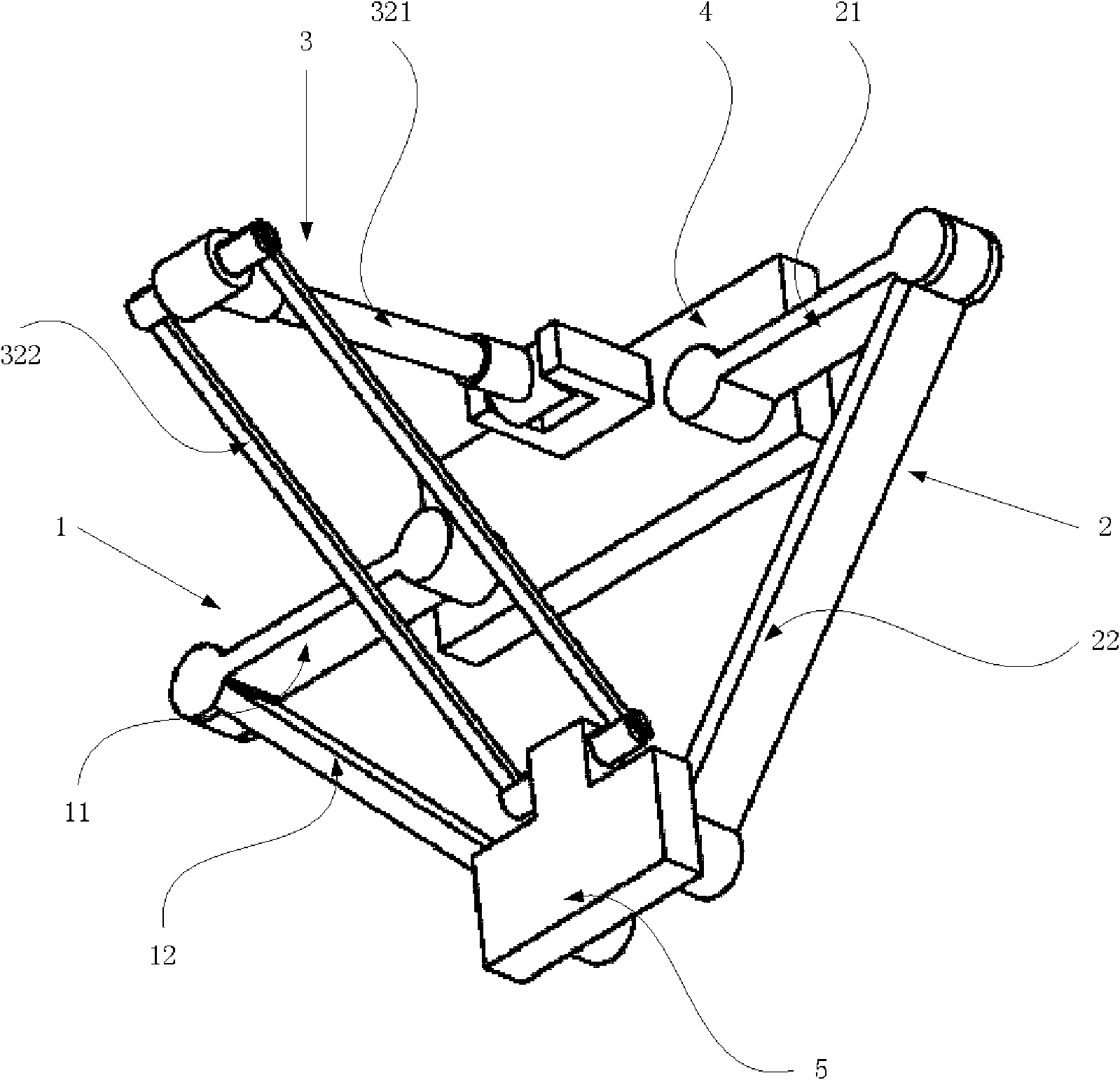
[0021] Such as figure 1 and figure 2 As shown, a two-degree-of-freedom translational parallel robot mechanism includes a base 4, a moving platform 5 and a branch chain respectively connecting the base 4 and the moving platform 5 (the branch chain includes the first active branch chain 1. The second active branch chain 2 and the third passive branch chain 3); the base 4 plays the role of fixing and supporting, that is, other components are directly or indirectly installed on the base 4; the branch chain plays the role of connection and adjustment, That is, the branch chain connects the moving platform 5 and the base 4, so the moving platform 5 is indirectly fixed on the base 4 through the branch chain. At the same time, when the movement state of the branch chain changes, the position of the moving platform 5 connected to it changes accordingl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More